Download
1 / 1
10 likes | 90 Views
The Robotic Wandering Ambassador. P13215 Spring 2013 - Fall 2014. Customer: Future Wandering Ambassador Teams. Mission

E N D
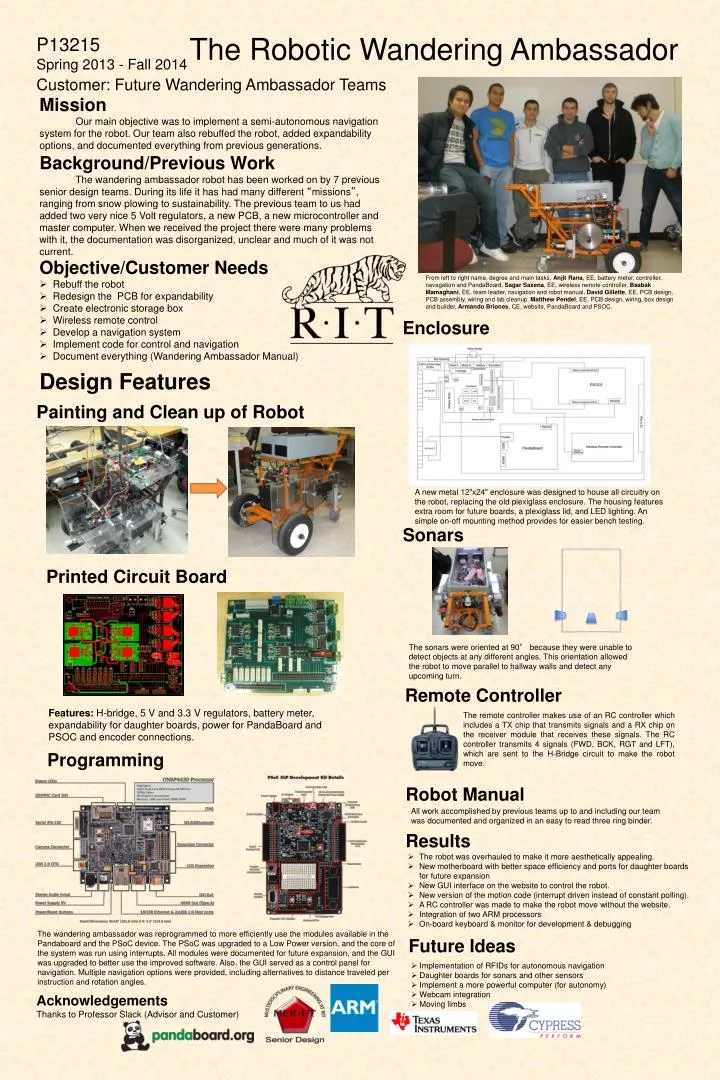
The Robotic Wandering Ambassador P13215 Spring 2013 - Fall 2014 Customer: Future Wandering Ambassador Teams Mission Our main objective was to implement a semi-autonomous navigation system for the robot. Our team also rebuffed the robot, added expandability options, and documented everything from previous generations. Background/Previous Work The wandering ambassador robot has been worked on by 7 previous senior design teams. During its life it has had many different “missions”, ranging from snow plowing to sustainability. The previous team to us had added two very nice 5 Volt regulators, a new PCB, a new microcontroller and master computer. When we received the project there were many problems with it, the documentation was disorganized, unclear and much of it was not current. • Objective/Customer Needs • Rebuff the robot • Redesign the PCB for expandability • Create electronic storage box • Wireless remote control • Develop a navigation system • Implement code for control and navigation • Document everything (Wandering Ambassador Manual) From left to right name, degree and main tasks, Anjit Rana, EE, battery meter, controller, navagation and PandaBoard, Sagar Saxena, EE, wireless remote controller, Baabak Mamaghani, EE, team leader, navigation and robot manual, David Gillette, EE, PCB design, PCB assembly, wiring and lab cleanup, Matthew Pendel, EE, PCB design, wiring, box design and builder, Armando Briones, CE, website, PandaBoard and PSOC. Enclosure Design Features Painting and Clean up of Robot A new metal 12"x24" enclosure was designed to house all circuitry on the robot, replacing the old plexiglass enclosure. The housing features extra room for future boards, a plexiglass lid, and LED lighting. An simple on-off mounting method provides for easier bench testing. Sonars Printed Circuit Board The sonars were oriented at 90° because they were unable to detect objects at any different angles. This orientation allowed the robot to move parallel to hallway walls and detect any upcoming turn. Remote Controller Features: H-bridge, 5 V and 3.3 V regulators, battery meter, expandability for daughter boards, power for PandaBoard and PSOC and encoder connections. The remote controller makes use of an RC controller which includes a TX chip that transmits signals and a RX chip on the receiver module that receives these signals. The RC controller transmits 4 signals (FWD, BCK, RGT and LFT), which are sent to the H-Bridge circuit to make the robot move. Programming Robot Manual All work accomplished by previous teams up to and including our team was documented and organized in an easy to read three ring binder. Results • The robot was overhauled to make it more aesthetically appealing. • New motherboard with better space efficiency and ports for daughter boards for future expansion • New GUI interface on the website to control the robot. • New version of the motion code (interrupt driven instead of constant polling). • A RC controller was made to make the robot move without the website. • Integration of two ARM processors • On-board keyboard & monitor for development & debugging The wandering ambassador was reprogrammed to more efficiently use the modules available in the Pandaboard and the PSoC device. The PSoC was upgraded to a Low Power version, and the core of the system was run using interrupts. All modules were documented for future expansion, and the GUI was upgraded to better use the improved software. Also, the GUI served as a control panel for navigation. Multiple navigation options were provided, including alternatives to distance traveled per instruction and rotation angles. Future Ideas • Implementation of RFIDs for autonomous navigation • Daughter boards for sonars and other sensors • Implement a more powerful computer (for autonomy) • Webcam integration • Moving limbs Acknowledgements Thanks to Professor Slack (Advisor and Customer)