Download
1 / 27
340 likes | 895 Views
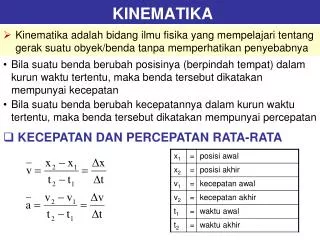
Základy kinematiky. Kinematika hmotného bodu. Kinematika - je obor mechaniky, který popisuje pohyb hmotného bodu, tuhého tělesa nebo soustavy těles v závislosti na prostoru, ale nezabývá se příčinami pohybu.

E N D
Základy kinematiky Kinematika hmotného bodu
Kinematika - je obor mechaniky, který popisuje pohyb hmotného bodu, tuhého tělesa nebo soustavy těles v závislosti na prostoru, ale nezabývá se příčinami pohybu. Těleso je zpravidla nahrazeno zjednodušeným obecným modelem tzv. hmotným bodem.Hmotný bod, který zastupuje těleso, má hmotnost rovnou hmotnosti tělesa a umisťujeme jej do těžiště tělesa. Těleso je vůči jinému tělesu v klidu, když vzhledem k němu nemění svou polohu. Těleso je vůči jinému tělesu v pohybu, když vzhledem k němu mění svou Klid nebo pohyb těles nikdy nelze určit jednoznačně musí se určit vztažné těleso (nejčastěji se jedná o povrch Země), vzhledem kterému se těleso pohybuje, anebo je v klidu. Příklad – jestliže sedíme v jedoucím autě, jsme vůči autu v klidu a vůči zemi v pohybu. Klid je vždy relativní. Absolutní klid neexistuje.
Když vztažné těleso umístíme do počátku soustavy souřadnic, získáme vztažnou soustavu. Stav hmotného bodu (HB) je pak určen čtyřmi rozměry – x, y, z (určují polohu HB v soustavě souřadnic) a časem t. Pozn.: Pozn.: Vztažné soustavě však může chybět rozměr y – pro pohyb po ploše (např. fotbalista na hřišti), nebo irozměrz – pro pohyb po přímce (např. běžec na 100 metrů). Polohu HB lze vyjádřit také pomocí polohového vektoru r (jeho počáteční bod leží v počátku soustavy souřadnic, koncový bod je dán hmotným bodem. Poloha vektoru se pak udává velikostí vektoru a směrem. Velikost: Směr je dán pomocí úhlů α, β, γ, které svírá s osami souřadnic.
Dráha tzv. trajektorie je geometrická čára (přímka nebo křivka), spojnice okamžitých poloh pohybujícího se hmotného bodu v rovině nebo prostoru. Podle jejího tvaru dělíme pohyby na: 1. posuvné přímočaré (translační) – trajektorie všech bodů tělesa tvoří shodné přímky nebo křivky, 2. křivočaré otáčivé (rotační) - trajektorie všech bodů tělesa tvoří soustředné kružnice kolem stálé osy otáčení. Obecný pohyb tělesa je složen z pohybu posuvného a rotačního. Vyjádříme-li polohu HB polohovým vektorem a mění-li HB polohu v závislosti na čase – vyjadřují polohy HB v bodech A, B, C, D vektory OA, OB, OC a OD.
A) Posuvného všechny jeho body opisují trajektorie, které mají stejný tvar a stejnou délku B) Otáčivého - jednotlivé body opisují při otáčivém pohybu kružnice. Pohyb tělesa se skládá ze dvou základních pohybů: Nejčastěji však těleso vykonává pohyb složený z těchto dvou jednoduchých pohybů.
Dráha hmotného bodu • Je délka trajektorie, kterou bod opíše za určitý čas • Značí se: s • Jednotky: jednotky délky • Dráha je funkcí času (= závisí na čase, po který je hmotný bod v pohybu). Závislost dráhy na čase můžeme znázornit i graficky v pravoúhlých souřadnicích:
Pokud se HB při pohybu přesune za čas t z bodu A do bodu A´, změní se jeho polohový vektor o r. Okamžitá rychlostv v čase t v bodě A je dána podílem • je vektor, určovaný pomocí změny polohového vektoru bodu Z obrázku vyplývá, že směr vektoru rychlosti je tečna k trajektorii pohybu, orientace je ve směru změny polohového vektoru. Rychlost je vektorová veličina. Rychlost je změna polohy za čas. Velikost okamžité rychlosti je dána podílem velikosti změny polohového vektoru a časového intervalu, který změna polohy trvala. [m s–1]
Pro zjednodušení lze vyjádřit pomocí dráhy a času průměrná rychlost vp. Je to skalární veličina, která udává dráhu s, kterou HB urazí za delší časový interval t. jednotky: m/s = m.s-1, nebo km/h = km.h-1 (1 m/s = 3,6 km/h) Velikost okamžité rychlosti lze definovat také jako průměrnou rychlost na velmi malém úseku trajektorie pro velmi malý časový interval.
Rozdělení pohybů podle závislosti na čase (rychlosti)1. Rovnoměrný(konstantní rychlost) 2. Nerovnoměrný (rychlost se s časem mění) Změny rychlosti charakterizuje vektorová veličina zrychlenía. Má-li HB v bodě A a v čase t rychlost v a v bodě A´ a čase t+ t rychlost v´, pak se rychlost změní o v. Velikost okamžitého zrychlení a je dána vztahem [m s–2] Okamžité zrychlení má směr změny rychlosti v. Zrychlení má vždy tečnou a normálovou složku. Tečné zrychlení mění velikost rychlosti, normálové zrychlení mění směr rychlosti.
Pohyb Tečné zrychlení Normálové zrychlení Celkové zrychlení Rovnoměrný přímočarý at = 0 an = 0 a = 0 Rovnoměrný křivočarý at = 0 an 0 a 0 Nerovnoměrný přímočarý at 0 an = 0 a 0 Nerovnoměrný křivočarý at 0 an 0 a 0 Pohyby a jejich zrychlení Celkové zrychleníje rovno vektorovému součtu obou zrychlení Známe-li velikost tečného a normálového zrychlení,lze velikost celkového zrychlení vypočítat vztahem: Velikost okamžitého zrychlení je dána:
Rovnoměrný posuvný přímočarý pohyb Tento pohyb je charakterizován zrychlením a = 0 Pohyb je dán jeho počáteční rychlostí v0. Z toho, že zrychlení je nulové, vyplývá, že rychlost je konstantní, tj. nemění ani svou velikost ani směr. Trajektorií je přímka. Při rovnoměrném přímočarém pohybu se dráha mění přímo úměrně v závislosti na čase, kdy konstantou úměrnosti je rychlost. s= s0 + v0 . t v = v0
Graf závislosti rychlosti rovnoměrného přímočarého pohybu na čase, jeho vyšrafovaná plocha je dráha s, kterou HB urazil za 4 s. Graf závislosti dráhy rovnoměrného přímočarého pohybu s počáteční dráhou s0 na čase t.
Rovnoměrně zrychlený (zpomalený) posuvný přímočarý pohyb Rychlost je přímo úměrná času a konstantou úměrnosti je zrychlení. Dráha je přímo úměrná čtverci času.Celková dráha je rovna součtu dráhy na začátku pohybu s dráhou, kterou by HB urazil, kdyby se pohyboval rovnoměrně a s dráhou, kterou by HB urazil, kdyby zrychloval s nulovou počáteční rychlostí.
Tento pohyb charakterizuje nenulové zrychlení a, které je rovnoběžné se směrem pohybu, tzn. mění se jen velikost rychlosti a ne její směr. Trajektorií je přímka. Při zpomaleném pohybuje orientace zrychlení proti směru pohybu, jeho velikost vzhledem k pohybu má záporné hodnoty. Na horní přímce obrázku je vývoj rychlosti při rovnoměrně zrychleném přímočarém pohybu, na dolní je vývoj rychlosti při rovnoměrně zpomaleném pohybu. Nahoře se její velikost zvětšuje, dole zmenšuje.
Na obrázku vlevo jsou dva grafy: graf v = at pro závislost rychlosti na čase při rovnoměrně zrychleném pohybu s nulovou počáteční rychlostí, graf v = v0+at s počáteční rychlostí v0. Obrázek vpravo vyznačuje závislost rychlosti na čase při rovnoměrně zrychleném pohybu s počáteční rychlostí v0 = 2 m/s. Vyšrafovaná plocha ve směru je dráha, kterou by HB urazil rovnoměrným přímočarým pohybem s rychlostí v0, plocha vyšrafovaná ve směru je plocha, kterou urazí HB rovnoměrně zrychleným pohybem se zrychlením a a nulovou počáteční rychlostí. Součet těchto dvou ploch je dráha rovnoměrně zrychleného pohybu se zrychlením a a počáteční rychlostí v0.
Na obrázku vlevo je graf dráhy rovnoměrně zrychleného pohybu se zrychlením a a nulovou počáteční rychlostí.Vpravo je graf dráhy rovnoměrně zpomaleného pohybu. Zrychlení a je orientované proti směru pohybu s počáteční rychlostí v0.
Volný pád Volný pád je zvláštní případ pohybu rovnoměrně zrychleného s nulovou počáteční rychlostí. Jedná se o pohyb tělesa volně puštěného v blízkosti povrchu Země ve vakuu. Blízkost povrchu Země je důležitá pro předpoklad, že tíhové zrychlení je konstantní, předpoklad vakua je důležitý proto, aby těleso nebylo nadlehčováno vzduchem a nepůsobily na něj odporové síly prostředí.První pokusy s volným pádem prováděl už v 17. století Galileo Galilei. Ten prokázal, že se jedná o pohyb rovnoměrně zrychlený, později bylo stanoveno i jeho zrychlení - tíhové zrychlení, které míří svisle dolů (do středu Země) a je způsobeno zemskou přitažlivostí. Velikost tíhového zrychlení je závislá na nadmořské výšce a na zeměpisné šířce daného místa na Zemi, protože vlivem odstředivé síly zemské rotace je největší na pólech a nejmenší na rovníku.Mezinárodně bylo stanoveno tzv. normální tíhové zrychleníg = 9,80665 m.s-2, které přibližně odpovídá tíhovému zrychlení na 45o zeměpisné šířky při hladině moře (počítáme s hodnotou g =9,81 m s–2 nebo 10m s–2).
Vzhledem k tomu, že se jedná o pohyb rovnoměrně zrychlený, je možné volný pád popsat následujícími vztahy: kde h je výška nad povrchem Země, z níž bylo těleso spuštěno, v je rychlost pádu tělesa v čase t . Mezi další charakteristiky volného pádu patří čas dopadu,tj. čas, který uplyne od puštění tělesa z výšky h do jeho dopadu na Zem a velikost rychlosti dopadu, tedy rychlost, kterou těleso dopadne na Zem. Čas dopadu je možné vyjádřit ze vztahu takto
K určení velikosti rychlosti dopaduvdje nutné si uvědomit, že rychlost dopadu je rychlost, kterou bude těleso mít v čase, kdy dopadne na Zem (tedy v čase td). Proto je možné psát a po dosazení V našich úvahách nevystupovala hmotnost tělesa. Z toho plyne, že rychlost dopadu, ani čas dopadunení závislý na hmotnosti tělesa. Všechna tělesa tedy padají ve vakuu k Zemi stejnou rychlostí. Ale tento poznatek je silně v rozporu s naší běžnou zkušeností: jestliže např. hodíme z mostu do řeky pírko a kámen, dopadne podstatně dříve do vody kámen. Problém je v tom, že ve skutečnosti na pohybující se předmět působí ještě i odporová síla vzduchu. Vzhledem k tomu, že je závislá na ploše tělesa, je výrazně větší u lehkého pírka s velmi členitým povrchem.
Skládání přímočarých pohybů HB často koná více pohybů současně:- člověk, který se pohybuje ve vlaku a my zjišťujeme jeho pohyb vzhledem k zemi,- člun plující přes řeku atd. Výslednou polohu tělesa získáme složením dílčích jednoduchých pohybů. Při skládání pohybů platí princip nezávislosti pohybů: Koná-li HB současně dva nebo více pohybů po dobu t, je jeho výsledná poloha taková, jako kdyby konal tyto pohyby postupně v libovolném pořadí, každý po dobu t.
Rovnoměrný rotační pohyb po kružnici Je rovnoměrný pohyb, jehož trajektorií je kružnice. Pro určení polohy HB na kružnici se používá úhel. Jeho velikost je určena poměrem délky oblouku kružnice sod daného nulového bodu a poloměru kružnice r. Jednotkou této úhlové míry je radián (1 rad = 57°30´),. Velikost úhlu, který opíše HB při oběhnutí celé kružnice je
Umístíme-li do středu kružnice počátek soustavy souřadnic, pak poloměr v bodě kružnice A, kde se nachází HB, je polohový vektor. Podle definice rychlosti platí . Směr rychlosti je tečna ke kružnici v daném bodě. Velikost rychlosti HB však závisí na poloměru kružnice. Proto se zavedla veličina úhlová rychlost, která neuvažuje poloměr kružnice. (úhlová rychlost je vektorová veličina – směr je kolmice k rovině kružnice, vektor umísťujeme do středu kružnice) Z definic rychlosti a úhlové rychlosti v = r vyplývá, že = t Úhel, který opíše HB za čas t, je přímo úměrný úhlové rychlosti
Rovnoměrný pohyb po kružnici je pohyb periodický, tzn. stále se opakuje oběh celého obvodu kružnice. Čas, za který HB oběhne celý obvod kružnice, tj. úhel 2, se nazývá perioda pohybu a značí se T. Podle vztahu platí Kromě periody T je zavedena také frekvence pohybu f. Vyjadřuje počet oběhů HB za jednotku času. [s–1 = hertz = Hz] Vztah pro úhlovou rychlost má pak tvar = 2 f
Při rovnoměrném pohybu po kružnici se nemění velikost rychlosti, ale mění se směr.Proto je tečné zrychleníat rovno nule a pohyb je charakterizován normálovým neboli dostředivýmzrychleníman (ad). Toto zrychlení je vždy kolmé ke směru okamžité rychlosti, v případě kružnice pak směřuje do středu kružnice. Jeho velikost je dána vztahem: Na obrázku jsou vyznačeny okamžité rychlosti a okamžité zrychlení v daných bodech.
Při rovnoměrném rotačním pohybu u strojů a zařízení se udává otáčivý pohyb Počtem otáček n za minutu. Pak je obvodová rychlost rovna vztahu: úhlová rychlost doba T jedné otáčky Frekvence f (počet otáček za sekundu) je rovna Konstantní dostředivé zrychlení (normálové) se rovná
Nerovnoměrný rotační pohyb po kružnici (zrychlený nebo zpomalený) , ale mění se. V případě tohoto nerovnoměrného pohybu Proto vzniká úhlové zrychlení Jestliže je okamžitá úhlová rychlost , tečné zrychlení a obvodová rychlost pak při r = konst. tečné zrychlení hmotného bodu je úměrné poloměru kružnice otáčenía úhlovému zrychlení. Jestliže dostředivé (normálové) zrychlení pak celkové zrychlení je tedy rovno při při počáteční nulové úhlové rychlosti (pohyb rovnoměrně zrychlený)
při (pohyb rovnoměrně zrychlený) při počáteční nulové úhlové rychlosti Jestliže těleso (HB) již má nějakou počáteční úhlovou rychlost Pak se úhlová rychlost určí ze vztahu