Download
1 / 26
260 likes | 442 Views
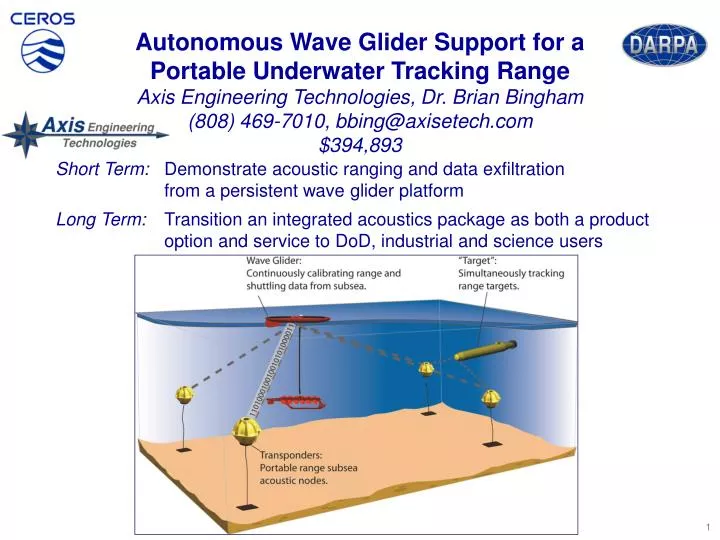
Autonomous Wave Glider Support for a Portable Underwater Tracking Range Axis Engineering Technologies, Dr. Brian Bingham (808) 469-7010, bbing@axisetech.com $394,893. 1. Acoustic Integration Acheivement. STATUS QUO. QUANTITATIVE IMPACT. END-OF-PHASE GOAL. NEW INSIGHTS.

E N D
Autonomous Wave Glider Support for a Portable Underwater Tracking RangeAxis Engineering Technologies, Dr. Brian Bingham(808) 469-7010, bbing@axisetech.com$394,893 1
Acoustic Integration Acheivement STATUS QUO QUANTITATIVE IMPACT END-OF-PHASE GOAL NEW INSIGHTS Unmanned Range Support Vessel Automated transponder calibration (< 2.5 hrs) Subsea target localization (< 2.0 m drms) Data Exfiltration (> 80 bps, up to 240 bps) Endurance (24/7 operation for > 5 days) Maintain telemetry (> Sea State 3) • Unmanned Range Vessel • Reduced acoustic noise • Reduced personnel, equipment and fuel costs • Capability for covert range/sensor network operation • Free the range vessel for other support tasks: • Target recovery • Water space control • Persistent operations • How it Works: • Integrated mechanical design • Command and control integration • - Real-time connection to the ROC • Flexible telemetry • - Iridium, WiFi, WiMAX, HFGW radio • Assumptions and Limitations: • Re-tasking, not elimination of range vessel. • Range vessel participates in the solution. • Future ranges will incorporate ‘smart’ transponders Range Vessel Stationed in the center of the range Acoustically noisy Operationally constrained Costly (personnel, fuel, dedicated resource, etc.) Wave Glider Platform Endurance and reliability Acoustic Modem . Ranging and communication Autonomous Acoustic Navigation Robust operational algorithms Proof-of-Concept Field Demonstration Joint operation (ONR, Mike Traweek) Develop requirement for next portable range acquisition 3 Expanding the training, testing and evaluation mission of portable underwater tracking ranges Company: Axis Engineering Technologies, Inc. Contact: Brian Bingham Email: bbing@axisetech.com Phone: (808) 469-7010
Innovation Importance • The Pacific Fleet will likely acquire two additional PUTRs to support 7th Fleet operations. • Successful demonstration will lead to inclusion in next requirements document • Ed Potter, CPF N73 will participate in design reviews and field demonstrations • Impact of general capability • Joint proof-of-concept. Mike Traweek (sensor networks) has volunteered ONR assets to participate in field demonstration. • Data exfiltration: If proven, Tom Curtin (Chief Scientist, NURC) will include these assets in NATO field trials in 2011. • DARPA Deep Sea Operations (DSOP): Successful demonstration will lead to immediate service opportunity with Woods Hole Oceanographic Institution (Andrew Bowen) 4
State of the Art Portable Range Technology • MariPro’s portable acoustic range (PAR) concept • AUTEC’s buoyed acoustic range tracking system (BARTS) • Desert Star Systems RangeNav • Previous project by SAIC/NUWC Data Exfiltration • Collaborating with leaders: LRI and WHOI Station Keeping Buoy • DARPA Persistent Ocean Surveillance – Station Keeping program (POS-SK) Babicz, R.; Baker, J.; Jalbert, J., "The Evolution of Autonomous Untethered Gateway Communications Buoys," OCEANS 2006 , vol., no., pp.1-6, 18-21 Sept. 2006 Curcio, J.A., et al. "Self-Positioning Smart Buoys, The "Un-Buoy" Solution: Logistic Considerations using Autonomous Surface Craft Technology and Improved Communications Infrastructure," OCEANS 2006 , vol., no., pp.1-5, 18-21 Sept. 2006. 5
Scientific / Technical Information • Technical Risks/Advancements • Mechanical integration • System-level error budget • Signal-to-Noise ratio • 8-18 km (deep), 4-5 km (shallow) • Autonomous tracking and navigation • Complex kinematics • Novel estimation scheme • Onboard power (25-40 W continuous) graphic 6
Customer Identification Primary: Navy Ranges and Fleet Training (OPNAV N433) and Commander of Pacific Fleet (COMPACFLT) • Short term: Customer involvement through Ed Potter • Long term: Successful demonstration will need to next generation requirements Secondary: ONR, NURC, DARPA • Short term: Joint field deployment with ONR assets (Mike Traweek) • Long term: Infrastructure and proven capability for DARPA-DSOP and NURC operations 7
What is your Plan? • On the slides that follow: • Define your Quantitative Goals and Success Criteria • Define your Work Tasks / Costs / Level of Effort • Define your Customer engagement plan (in association with project tasks and milestones) • Illustrate your overall Project Plan and Schedule • Describe or Illustrate your Transition plan 8
Transition • Product: For acquisition, LRI will include a hardware upgrade of integrated acoustic ranging and navigation. • Service: For operations, Axis will operate a turn-key data exfiltration capability. • Partners:. • COMPACFLT: Ed Potter (CPF N73) will provide operational guidance and transition support toward fleet requirements. • ONR: Mike Traweek will provide operational assets (gliders) to participate in proof-of-concept field demonstration. • NURC: Tom Curtin • Liquid Robotics, Inc. has agreed to partner on offering the integrated acoustic hardware/software package though their platform sales. • University of Hawaii is supporting this project through leveraged salary support of co-Pis • Obligated funding: identify sources and funding being committed or POMed to make this effort a real future capability • Leveraged funds: identify and provide details of agreements with others that support the effort now or in the future • Partners: list organizations, individuals, email addresses… collaborating in the effort and describe how they will participate • Endorsements: List endorsements and indicate what future support these parties will provide in making this effort a reality • Expected Intellectual Property (IP) 13
Autonomous Wave Glider Support for a Portable Underwater Tracking RangeAxis Engineering Technologies, Dr. Brian Bingham(808) 469-7010, bbing@axisetech.com$394,893 Q&A / Discussion 14
PROPOSED PROJECT TITLECompany, Principal Investigator, Phone, EmailContract Cost Q&A / Discussion 15
Employment Support • New Job Creation • Research Assistant at UH, full-time. • Partial Support • Axis Engineering Technologies • Eric Prechtl, President, 18% • Brian Bingham, Partner, 11% • University of Hawaii • Bruce Howe, Amit Sanyal and Brian Bingham, 8.3% • Staff Engineer, 8.3% 17
Endorsements • COMPACFLT (Ed Potter): Will participate and, if the technology is proven, well assist with next generation requirements. • ONR (Mike Traweek, program manager): Will provide operational support and possible follow-on funding. • NURC (Tom Curtin): Will provide operational support. A potential customer for future service-model contract. 21
CNO N4 Organization N4 VADM Justin McCarthy, O-9 Deputy CNO (FR&L) N4B Ariane L. Whittemore, SES-6 Asst Deputy CNO (FR&L) Planning & Innovation (N40) Supply, Ordnance & Log Operations (N41) Strategic Mobility & Combat Logistics (N42) Fleet Readiness (N43) N40 Mark Honecker, SES-4 Director N41 RADM(S) Alan Thompson, SC, O-7 Director N42 Jonathan Kaskin, SES-4 Director N43 RADM James Robb, O-8 Director Environmental Readiness (N45) Ashore Readiness (N46) N43B RDML(S) J. C. Orzalli, O-7 Deputy Director N45 RDML(S) Mark Boensel, O-7 Director N46 RADM Chris Weaver, O-8 Director SEABEE Readiness (N44) N433 Navy Ranges and Fleet Training N46B/N44 RDML Wayne Shear, O-7 Deputy Director N45B Bill Mattheis, SES-3 Deputy Director
Anticipated Transition Plan Class of Endorsements: 1) “We will help fund …” 2) ”If successful, we will do …” 3) “We will provide planes, vessels, people and will mentor and advise.” 4) “We are interested in the outcome.” Potential Interest, but no endorsements: Identify PEOs Identify Commands Current Systems Current Products Organizations and assets in position to benefit from project results and operational transition, but without firm, funded requirements: Program AandProgram Bleverage CEROS funding. Program of Record, funded Requirements Class-4 Endorsement Program B $xxx K Class-1 Endorsement Ongoing support, expanded project Class-2 Endorsement Program A $xxx K Class-1 Endorsement Facilitate ongoing tests and development Class-3 Endorsement Reach TRL4: For TRL 5-7: Add functionality, modules, capabilities CEROS $xxx K (Support Design/Planning And Proof of concept) Year 5 Year 1 Year 2 Year 3 Year 4 TRL 8 Integrated operationally TRL 4 Component Validation in Lab TRL 6 Prototype demo in relevant environment TRL 7 Prototype demo in operational environment TRL 9 Operationally and mission proven
(additional backup slides as necessary; could include data tables or graphs, endorsements, etc.) 26