Download
1 / 47
530 likes | 808 Views
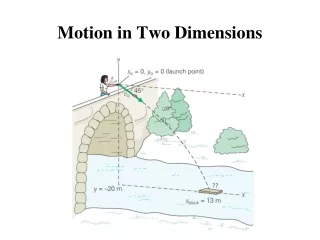
3. Motion in Two and Three Dimensions. Recap: Constant Acceleration. Area under the function v ( t ). Recap: Constant Acceleration. Recap: Acceleration due to Gravity (Free Fall).

E N D
Recap: Constant Acceleration Area under the function v(t).
Recap: Acceleration due to Gravity (Free Fall) In the absence of air resistance all objects fall with the sameconstant acceleration of about g = 9.8 m/s2 near the Earth’s surface.
5 m/s 2 m Recap: Example A ball is thrown upwards at 5 m/s, relative to the ground, from a height of 2 m. We need to choose a coordinate system.
v0 = 5 m/s y y0 = 2 m Recap: Example Let’s measure time from when the ball is launched. This defines t = 0. Let’s choose y = 0 to be ground level and up to be the positivey direction.
v0 = 5 m/s y y0 = 2 m Recap: Example 1. How high above the ground will the ball reach? use with a = –g and v= 0.
v0 = 5 m/s y y0 = 2 m Recap: Example 2. How long does it take the ball to reach the ground? Use with a = –g and y = 0.
v0 = 5 m/s y y0 = 2 m Recap: Example 3. At what speed does the ball hit the ground? Use with a = –g and y = 0.
Vectors A vectoris a mathematical quantity that has two properties: directionand magnitude. One way to represent a vector is as an arrow: the arrow gives the direction and its length the magnitude.
p Position A position p is a vector: its direction is from o to p and its length is the distance from o to p. A vector is usually represented by a symbol like .
A displacement is another example of a vector. Displacement
Vector Addition The order in which the vectors are added does not matter, that is, vector addition is commutative.
Vector Scalar Multiplication a and –q are scalars (numbers).
Vector Subtraction If we multiply a vector by –1 we reverse its direction, but keep its magnitude the same. Vector subtraction is really vector addition with one vector reversed.
Vector Components Acosq is the component, or the projection, of the vector A along the vector B.
Unit Vectors From the components, Ax, Ay, andAz, of a vector, we can compute its length, A, using If the vector A is multiplied by the scalar 1/A we get a new vector of unit length in the same direction as vector A; that is, we get a unit vector.
Unit Vectors It is convenient to define unit vectors parallel to the x, y and z axes, respectively. Then, we can write a vector A as follows:
N W E S Relative Motion Velocity of plane relative to air Velocity of air relative to ground Velocity of plane relative to ground
N W E S Example – Relative Motion A pilot wants to fly plane due north Airspeed: 200 km/h Windspeed: 90 km/h direction: W to E 1. Flight heading? 2. Groundspeed? Coordinate system: îpoints from west to east and ĵ points from south to north.
N W E S Example – Relative Motion
N W E S Example – Relative Motion
N W E S Example – Relative Motion Equate x components 0 = –200 sinq + 90 q = sin-1(90/200) = 26.7o west of north.
N W E S Example – Relative Motion Equate y components v = 200 cosq = 179 km/h
Projectile Motion under Constant Acceleration Coordinate system: îpoints to the right, ĵ points upwards
Projectile Motion under Constant Acceleration Impact point R = Range
Projectile Motion under Constant Acceleration Strategy: split motion into x and y components. R = Range R = x - x0 h = y - y0
Projectile Motion under Constant Acceleration Find time of flight by solving y equation: And find range from:
Projectile Motion under Constant Acceleration Special case: y = y0, i.e., h = 0 R y(t) y0
Uniform Circular Motion O r = Radius
Uniform Circular Motion Velocity
Uniform Circular Motion dq/dt is called the angular velocity
Uniform Circular Motion Acceleration For uniform motion dq/dt is constant
Uniform Circular Motion Acceleration is towards center Centripetal Acceleration
Uniform Circular Motion Magnitudes of velocity and centripetal acceleration are related as follows
Uniform Circular Motion Magnitude of velocity and period T related as follows r
Summary • In general, acceleration changes both the magnitude and direction of the velocity. • Projectile motion results from the acceleration due to gravity. • In uniform circular motion, the acceleration is centripetal and has constant magnitude v2/r.
How to Shoot a Monkey x = 50 m h = 10 m H = 12 m Compute minimum initial velocity H