Download

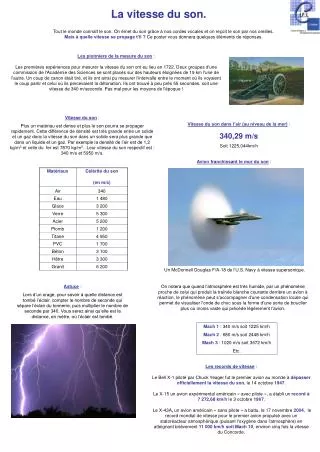
1 / 20
200 likes | 451 Views
4. Vitesse et accélération. - Expressions selon coordonnées Applications aux mvts connus Trièdre de Frenet. Le temps. Repère + horloge = référentiel Mesure des vitesses et accélérations. Hypothèse newtonienne. Mécanique newtonnienne

E N D
4. Vitesse et accélération • - Expressions selon coordonnées • Applications aux mvts connus • Trièdre de Frenet
Le temps • Repère + horloge = référentiel • Mesure des vitesses et accélérations
Hypothèse newtonienne • Mécanique newtonnienne « le temps est identique dans ts les référentiels » v < 0,1c c = 300 000km/s • Mécanique relativiste si v > 0,1c
Définitions: scalaires et vecteurs • Position de M : • des scalaires (coordonnées, équation de la trajectoire équations paramétriques ou lois horaires) • vecteur position OM • Vitesse de M : • un scalaire v, v(M) en m.s-1 • vecteur vitesse v(M) = dOM/dt • Accélération de M : • un scalaire a, a(M) en m.s-2 • vecteur accélération a(M) = dv(M)/dt = d²OM/dt²
Définitions scalaires • Vitesse moyenne, <v> = s (distance ) /t • Vitesse instantanée, ou vitesse linéaire, v = || v(M) || vitesse angulaire : ω = dθ/dt rd/s v = R|ω|rayon cercle ou rayon courbure • Accélération moyenne <a> = v /t • Accélération instantanée, a = || a(M) ||
Coordonnées du vecteur vitesse, ou accélération • Si référentiel de dérivation (observation) = référentiel de définition (écriture) OM v(M) a(M) x dx/dt d²x/dt² y …. …. z dz/dt d²z/dt²
Coordonnées du vecteur vitesse, ou accélération • Application : v(M) a(M) en coordonnées cartésiennes Règle: il suffit de dériver les coordonnées… • Pour les autres coordonnées : • Cylindriques, polaires • Intrinsèques (vitesse et accélération dans le repère de Frenet) Repère local (d’écriture) référentiel d’observation Règle ci-dessus non applicable
Vitesse en coordonnées cylindriques OM = r er + z ez v(M)= ( r er )' + (z ez)' = r er + r(der/dt) + z ez + z(dez/dt) = r er + rθ eθ + z ez vit. radiale v. orthoradiale (vr) (vθ)(vz)
vy vθ vr vx r(t) θ(t) Vitesse en coordonnées polaires et cartésiennes vx = x , vy = y v = vx2+vy2 = vr2 + vθ2
Accélération en coordonnées cylindriques a(M) = dv(M)/dt = (rer)' + (rθ eθ)' + (z ez)' = rer + rθeθ + rθ eθ+ rθ eθ –rθ²er+ z ez = (r –rθ²)er + (rθ+ 2rθ)eθ + zez acc. radiale acc. orthoradiale (ar) (aθ) (az)
aθ ay ax ar r(t) θ(t) Accélération en coordonnées polaires et cartésiennes ax = x , ay = y a = ax2 + ay2 = ar2+aθ2
Vitesse et accélération en coordonnées intrinsèques (repère de Frenet) v(M) = v T v = vitesse instantanée a(M) = (v T )' = (dv/dt)T + v (dT/dt) cours C2 « Repérage et coordonnées »
Accélération en coordonnées intrinsèques (dT/dt)=(v/Rc) N a(M) = (dv/dt)T + (v² / Rc)N acc. tangentielleacc. normale (at) (an) accélération instantanée : a = at2 + an2
accélération en coord intrinsèques • Calculer vitesse instantanée (ou linéaire) v = || v || en polaire ou en cartésien • Calculer (dv/dt) • Calculer Rc cours « Repérage et coordonnées » an = v² /Rc ; at = (dv/dt) ; a = an² + at²
aθ at an ar r(t) θ(t) Accélération en coordonnées intrinsèques et polaires a = an2 + at2 = ar2+aθ2 = ax2+ay2
Etude des mouvements simples Mouvement curviligne, mouvement rectiligne a) mvt curviligne => rayon de courbure Rc • Rc constant : cercle, hélice, trajectoire sur sphère • Rc non constant :parabole, ellipse, hyperbole, spirale, …
Etude des mouvements simples b) Mouvement rectiligne = cas limite de mvt curviligne, Rc + exemple : sur la Terre, Rc = 6400 000 m
Etude des mouvements simples Conséquence : dans le repère de Frenet • Acc. normale (v²/Rc) • = 0 si mvt rectiligne • > 0 si mvt curviligne • Acc. tangentielle (dv/dt) soit =0 ou 0(que le mvt soit rectiligne ou curviligne)
Mouvement uniforme • Un mvt est uniforme si v=cste • at = dv/dt = 0 accel. tangentielle nulle • Si le mvt est rectiligne uniforme (an = 0) a = an² + at²= 0 acc « totale » nulle • Si le mvt est curviligne uniforme, (an 0)a = an 0acc « totale » non nulle • exemple : mvt circulaire uniforme (MCU)v = cste , at = 0, an=v²/R a = v²/R
Mouvement varié Un mvt est varié si at 0 • uniformément varié si at = cste • uniformément accéléré at > 0(at de même sens que v) • uniformément retardé at < 0(at de sens opposé à v)