Download
1 / 54
560 likes | 1.26k Views
Magnetism. We are probably all familiar with the fact that magnets repel and attract each other. This is similar to electric charges. This suggests that we can propose the following law (like Newton’s Law of Gravity and Coulomb’s Law for Electricity): F magnetic = X p 1 p 2 / r 12 2

E N D
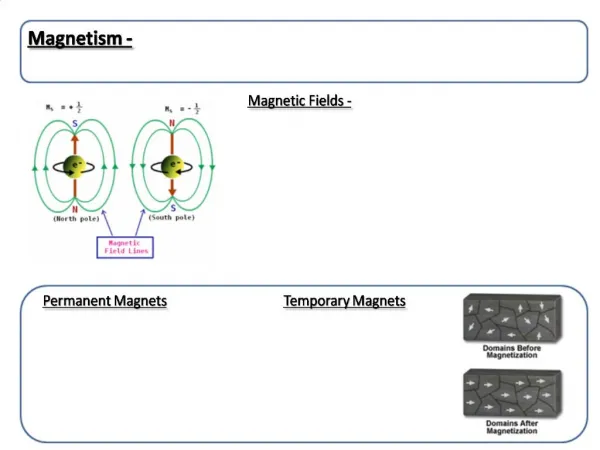
Magnetism We are probably all familiar with the fact that magnets repel and attract each other. This is similar to electric charges. This suggests that we can propose the following law (like Newton’s Law of Gravity and Coulomb’s Law for Electricity): Fmagnetic = X p1 p2 / r122 where Xwould be the magnetic constant, analogous to G and k, that describes the strength of the magnetic force.
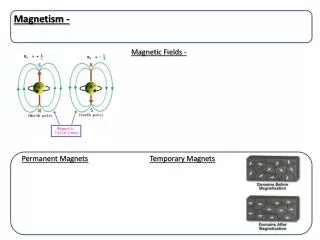
Magnetic Poles Fmagnetic = X p1 p2 / r122 . The “p” in the equation stands for pole. In magnetism, we have two kinds of poles, and we call them North and South. Like poles repel and unlike poles attract, just as electric charges do. However, unlike charges, we always have two poles! If we break a magnet (which has two poles) in half, we have not separated the two poles, rather we have two (smaller) magnets that both have two poles!
Magnetic Poles N S N S N S Break one bar magnet in half, and you have two smaller bar magnets!
Magnetism Since we cannot seem to isolate one magnetic pole like we could electric charges, the force equation that is similar to Newton’s and Coulombs Laws turns out to be not very useful. We do have a more useful alternative, though. It turns out that charges experience a force when moving near magnets. Note: the charge must be moving near a magnet, not just being near a magnet!
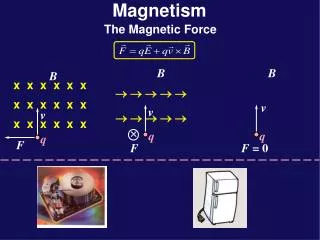
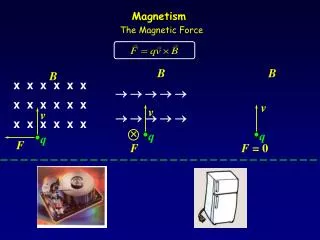
Magnetic Force Just as charges set up an electric field, and other charges in the vicinity feel an electric force due to that electric field (Fel = qE), we can work with the idea that magnets set up a magnetic field in space, and charges moving through that field experience a magnetic force. In addition to the necessity of moving, there is one more difference: the direction of the magnetic force is perpendicular to the magnetic field direction, and perpendicular to the velocity of the moving charge!
Magnetic Force Law magnitude: Fmagnetic = q v B sin(qvB) direction: right hand rule: thumb = hand x fingers Point your handin the direction of v, curl you fingers in the direction of B, and the force will be in the direction of your thumb; if the charge is negative, the force direction is opposite that of your thumb.
Units Fmagnetic = q v B sin(qvB) This law effectively defines the magnetic field, B (just like Felectric=qE defined E). The MKS units of B are: Tesla = Nt / [Coul-m/s] = Nt-sec / Coul-m . This unit turns out to be a very large one. We have a smaller unit, a Gauss, where: 10,000 Gauss = 1 Tesla .
Example A proton is moving at a speed of 3 x 104 m/s towards the West through a magnetic field of strength 500 Gauss directed South. What is the strength and direction of the magnetic force on the proton at this instant? v = 3 x 104 m/s, West B = 500 Gauss* 1 Tesla/10,000 Gauss = .05 T, South; q = +e = 1.6 x 10-19 Coul.
Example, cont. magnitude: Fmagnetic = q v B sin(qvB) direction: right hand rule magnitude: F = (1.6 x 10-19 Coul) * (3 x 104 m/s) * (.05 T) * sin(90o) = 2.4 x 10-16 Nt. direction: thumb = hand x fingers = West x South = UP. Note: although the force looks small, consider the acceleration: a= F/m = 2.4 x 10-16 Nt / 1.67 x 10-27 kg = 1.44 x 1011 m/s2.
Magnetic Forces We’ll play with magnetic forces on moving charges in the Magnetic Deflection experiment in lab. At that time we’ll also discuss and experiment with the earth’s magnetic field.
Magnetic Force and Motion Since the magnetic field is perpendicular to the velocity, and if the magnetic force is the only force acting on a moving charge, the force will cause the charge to go in a circle: SF = ma, Fmag = q v B, and acirc = w2r = v2/r gives: q v B = mv2/r, or r = mv/qB .
Mass Spectrograph We can design an instrument in which we can control the magnetic field, B. If we ionize (almost always singly) the material, we know the charge, q. We can use known voltages to get a known speed for the ions, v. We can then have the beam circle in the field and hit a target, and from that we can measure the radius, r. Hence, we can then calculate the mass using r = mv/qB .
Example To see if this is really feasible, let’s try using realistic numbers to see what the radius should be for a proton moving in a B field: q = 1.6 x 10-19 Coul; B = .05 Teslas (500 G) m = 1.67 x 10-27 kg; Vacc = 500 volts gives: (1/2)mv2 = qV, or v = [2qV/m]1/2 = 3.1 x 105 m/s r = mv/qB = (1.67 x 10-27kg)*(3.1 x 105 m/s) / (1.6 x 10-19 Coul)*(0.05 T) = .065 m = 6.5 cm.
Mass Spectrometer Heavier masses will give bigger radii, but we can shrink the radii if they become too big by using bigger magnetic fields. Note that by measuring quantities that we can easily measure (charge, radius, Voltage, magnetic field), we can determine very tiny masses! In one of our experiments in lab (Charge to Mass of the Electron), we will essentially determine the mass of an electron!
Velocity Selector To better control the velocity of the ions in a mass spectrometer, we can use a combination of electric and magnetic fields to select a particular velocity for the ions entering the main magnetic field. To do this, we recognize that a magnetic force depends on qvB, while an electric force depends on qE.
Velocity Selector If we make the (positive) ion beam go through an area with an Electric field directed up and a Magnetic field directed out, then for the beam to NOT be deflected, we need qvB = qE, which givesv=E/B. If the incoming ions go too fast, the magnetic force “wins” and they go too low; if they go too slow, the electric force “wins” and they go too high to enter the main field. parallel plates -Q to main Incoming ions B E field +Q
Velocity Selector As we saw in Part 1, the Electric Field for parallel plates is constant. As we saw in Part 2, the Electric Field is related to the voltage by: Ey = -DV/Dy . This means we can control E by controlling the voltage across the plates. This, then, means we can control the velocity of the ions entering the main magnetic field by controlling the voltage across the selector plates: v = V/dB
Other uses A cyclotron is an instrument used to accelerate charged particles to very high speeds. It uses magnetic fields to bend the charges around in circles to keep them in one place while they’re being accelerated. Magnetic bottles can be used to contain high energy plasmas in fusion research.
Cyclotron The idea behind a cyclotron is to have charges move in a circle, so the motion does not carry the charges too far away. We can accelerate the charges using voltage, but we do so not with one big voltage, but with having the charges “fall” through a smaller voltage several (many) times.
Cyclotron To make the charges go in a circle, we use an external magnetic field. To make the charges accelerate (speed up), we use a voltage difference. To make the charges keep “falling” through the voltage difference, we place the charges inside a metal short hollow cylinder, cut the cylinder in half. We then place an alternating voltage across the two halves of the cylinder.
Cyclotron A charged particle (q) is injected into the center of the cylinder with some initial speed, v. Due to the magnetic field, it will then go in a semi- circle. B B It will then be V acceleratedB B across the gap between the two halves of the cylinder (each called a “dee”) using a voltage, V.
Cyclotron After it is accelerated across the gap, the speed will be larger, and from (r = mv/qB), the radius of the semicircle will be larger. During the time it is inside the half cylinder (one of the dees), the voltage across the two dees will be switched in polarity. Thus, when the charge again approaches the gap, it will not slow down, but rather speed up again! The larger radii each time will prevent the particle from traversing exactly the same path each time.
Cyclotron Thus we get continual increases in speed reusing the same voltage source! The limit to the maximum speed is the maximum radius of the dees, not the maximum voltage we can obtain without causing lightning. Let’s see how long it takes the charge to make one half circle to see how long we have to switch the polarity of the voltage source:
Cyclotron Starting with: r = mv/qB, and using v = wr, where w = 2pf = 2p/T, we have: r = m(2pr/T) / qB , or solving for T: T = 2pm /qB . Note that the period does NOT depend on either the radius or the speed. That means the time to switch the polarity of the voltage source is constant!
Cyclotron - example r = mv/qB and T = 2pm/ qB To accelerate a proton to 1/10 the speed of light (3 x 107 m/s) using a magnetic field of 1 Tesla, we would need an r of: r = [(1.67 x 10-27kg)*(3 x 107m/s)] /[ (1.6 x 10-19 C) *(1 T)] = 0.313 m . T = [(2 * 3.1415 * 1.67 x 10-27 kg)]/ [(1.6 x 10-19 C) *(1 T)] = 6.6 x 10-8 sec, or f = 1/T = 15 MHz.
Cyclotron - example cont. If we were to accelerate a proton to 1/10 the speed of light using a single voltage, we would need a voltage of: Conservation of Energy: (1/2)*m*v2 = q*V, or V = (1/2)*m*v2/q = (1/2)*(1.67 x 10-27 kg) * (3 x 107 m/s)2 / 1.6 x 10-19 C = 4.7 Million volts. That voltage would be hard to keep from creating lightning and discharging!
Magnetic Forces The Computer Homework Vol. 4 #1, Magnetic Deflection, deals with magnetic forces on charged particles. We’ll discuss strategies for completing this assignment in class.
Forces, Fields and Currents If moving charges are acted upon by magnetic fields (as we just saw), then currents, which consist of moving charges, should be acted upon by fields. Another way of saying the same thing is: fields act on moving charges [F = qvB sin(qvB)], and currents consist of moving charges [qv = IDL] , so we have: Fon current = I L B sin(qIB)
Magnetic Force on Current Fon current = I L B sin(qIB) with direction: thumb(force) = hand(current) x fingers(field). Example: If the earth has a magnetic field of 1 gauss directed North (for simplicity - it really is directed down and to the North), what is the magnetic force on a current of 100 amps flowing East in a wire 50 meters in length between two telephone poles.
Example We are given: B = 1 gauss = 1 x 10-4 T, North I = 100 amps, East; L = 50 meters. Fon current = I L B sin(qIB) = (100 amps) (50 meters) (1 x 10-4 T) sin(90o) = 0.005 Nts directed up. (This is negligible compared to the weight of the cable!) Let’s now consider how this force will work on complete current circuits, not just individual lengths. Also, how can we make this magnetic force significant?
Forces on rectangular current loop Consider the situation in the figure below: A current loop (with current direction going counter-clockwise) is situated in a Magnetic Field going from North to South poles. N B S I
Forces on rectangular current loop We need to consider the forces on each of the four sides of the current loop. The force on the top and bottom of the loop are zero, since the field and current are either parallel or anti-parallel (qIB = 180o or 0o). I Ftop=0 N B S I Fbottom=0
Forces on rectangular current loop The current on the left side is going down while the field is directed to the right, so that means theforce is directed out of the screen, and the magnitude is: Fleft = I L B sin(90o) = ILB. F N IB S L
Forces on rectangular current loop The current on the right side is going up while the field is directed to the right, so that means the force is directed into the screen, and the magnitude is: Fright = I L B sin(90o) = ILB. F N B I S L
Net Force Ftop = 0 Fbottom = 0 Fleft = ILB out Fright = ILB in As we can see, the NET FORCE (S F) is zero. However, since the force is pushing out on the left and in on the right, there is aTorque! The loop will tend to rotate about an axis through the center.
Torque on rectangular current loop Recall that torque is: t = r F sin(qrF). In the figure below we can see that r = w/2. Thus the Fleftgives a torque of (w/2)ILB, and the Frightalso gives a torque of (w/2)ILB. r F F N IB I S L w
Torque on rectangular current loop Since both torques are trying to rotate the loop in the same direction, the total torque is: S t = wILB. We note that wL = A (width times length = Area). Also, we can have several loops (N) that will each give a torque. F F N IB I S L r w
Torque on a loop The final result for this loop is: t = N A I B sin(qIB) sin(qrF) . In this orientation, qIB = 90o and qrF = 90o . If the loop does rotate, we see that qIB remains at 90o(the current still goes up and down, the field still goes to the right), but qrF changes as the loop rotates! t = N A I B sin(qrF) .
Electric Meter One of the early types of current meters is one where we have such a loop of current in a magnetic field, and we have a restraining spring. As the current increases, the torque increases, but we have a restraining spring to keep it from rotating completely around. The bigger the current, the bigger the torque, and the loop will turn through a bigger angle. Attach a pointer onto the loop, and we have the (analogue) meter.
Electric Motor To create an electric motor that will continue to spin when a current is applied, we need to keep the current going up the right side, even when the side originally on the left becomes the right side due to the spinning. We can accomplish this by using a set of brushes as indicated in the next slide.
Electric Motor + - N S This diagram will be explained in class, since it involves three dimensions. The two green “C’s” are actually one ring that is split. The ring is in and out of the screen.
Electric Motor t = N A I B sin(qrF) . Since we switch the current to make it always run up whatever wire is on the left side, we make sin(qrF) always positive. To find the average torque, we need to determine the average of sin(q) from 0o through 180o.
Average of sin(q) To find an average, we simply add up the values and divide by the number of items we have: sin(q)avg = S sin(q) / S 1 With computers this is fairly easy to do. We can also do it with the calculus (replace S with ) sin(q)avg =opsin(q)dq / op1 dq = [-cos(p) - -cos(0)] / [p - 0] = 2/p .
Average Torque Thus we get for the average torque: taverage = (2/p) N A I B . But we usually describe motors by their power, not by their torque. Recall that Power is energy per time, and energy is force through a distance. For rotations, this becomes: energy is torque through an angle, and power is torque through an angle per time (but recall w = Dq/Dt).
Average Power Putting all of this together gives: Pavg = tavg w = w N A I B (2/p), and with w = 2pf, we have: Pavg = 4 f N A I B. Note that the power depends not only on the details of the motor (N, A, B) and the current (I), but also on how fast the motor spins (f)!
Example Design an electric motor that has a power of 1/2 hp when it rotates at a frequency of 120 Hz (120 cycles/sec * 60 sec/min = 7200 rpm). Pavg = 0.5 hp* (746 Watts/1 hp) = 373 Watts. f = 120 Hz. Design = ? (This means we specify N, A, I and B such that P = 373 Watts when f=120 Hz. We have some “free” choices!)
Example, cont. Pavg = 4 f N A I B. Pavg= 373 Watts, f = 120 Hz. Let’s start by choosing some reasonable values: choose an area (A) of 10 cm x 10 cm = .01 m2; choose a magnetic field (B) of 1000 Gauss (0.1 T). We can also choose a current (I) of 5 amps. This means that we can now solve for the number of turns, N.
Example, cont. Pavg = 4 f N A I B. Pavg= 373 Watts, f = 120 Hz. A = .01 m2B = 0.1 TI = 5 amps. N = P / [4 f A I B] = 373 Watts / [4 * 120 Hz * .01 m2 * 5 Amps * .1 T] = 155 turns.
Hall Effect Although we consider a current to be a flow of positive charges, what actually flows in normal electric currents: positive charges (protons or positive ions) from high voltage to low, or negative charges (electrons) from low voltage to high? How do we know this?
Hall Effect Lets see if a magnetic field can help show what happens. We will consider a conventional current going to the right in a magnetic field directed into the page. B I