Download
1 / 21

E N D
1. Sensors and Actuators Laboratory The University of Texas at Austin
Department of Aerospace Engineering and Engineering Mechanics
2. Overview Purpose
Laboratory set-up
Description of each station
Lego Mindstorms Educational Outreach
Demonstrations
3. Purpose Provide hands-on experience using aerospace sensors and actuators in lab course format
Emphasize interdisciplinary nature of hardware development and testing
4. History of S&A Lab Development Original Idea Proposed 2005
Using Academic Development Funds, Hardware was Procured* and Course Content was Developed in 2006
Course Offered �07, �08, �09 (~40 students)
Now going to every-other-year offering
Lab used for research in off-years
5. Course Concept Two agendas:
Theory and technology of sensor and actuator hardware
Practical experience operating physical systems and processing experimental data
Students perform 4 labs and 1 project in a single semester
Average 2 weeks per lab requires rapid competency on different workbenches
NI�s LabVIEW and Compact RIO used as tools to interface with hardware
6. Set-Up Stations Thermocouple/Fan/Heater (NI Example)
Magnetometer/Torque Rod
Optical Navigation
Control Moment Gyro
Hexapod Robot
Inertial Sensors Ni equipment Compact RIO Chassis
Compact RIO I/O Modules (9211, 9205,�.)
Compact RIO NI-7811, NI-7813
7. Thermocouple Lab � LabVIEW Introduction Hands-on NI Tutorial
Designed to familiarize students with LabVIEW and CompactRIO equipment
Simple Thermal Control System highlights both sensors and actuators
Thermocouple
Fan
Heater
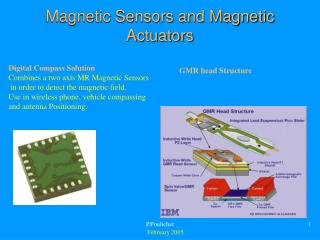
9. Magnetometer Laboratory Introduces students to magnetic field theory and focuses on applications related to spacecraft attitude determination and control
Designed to familiarize students Torque Rods, Torque Coils, and Magnetometers
Teaches students how to build Torque Rods and Torque Coils
Students use a 3 Axis magnetometer to test their actuators
Introduces noise and sensor biases
10. Magnetometer Laboratory
11. Optical Navigation Laboratory Introduction to optical navigation for applications such as spacecraft rendezvous and docking
Introduction to the primary components of imaging hardware, image acquisition, and image processing
Familiarize the student with the basics of image acquisition and processing, especially in the NI Vision framework using LabVIEW
Investigate static and dynamic properties of optical navigation tracking systems
12. Optical Navigation Laboratory
13. Optical Navigation Laboratory
14. Control Moment Gyro (CMG) Enable an understanding of the operation of the ECP Model 750 CMG through a LabVIEW real time computer
Introduction to the Control Moment Gyroscope and its dynamics
Review and Implementation of different types of controllers such as open-loop, P, PD, and PID closed loop controllers
Explore and characterize different friction models that affect the CMG
15. Control Moment Gyro (CMG) CMG Video
16. Inertial Sensors Laboratory Designed to familiarize students with inertial sensors and the different type of operating principles they use
Investigate differences in several types of sensors
Perform calibration of sensors and compare against manufacturer specifications
Students have to create all of the LabVIEW interface between the sensors and the CompactRIO, and Host Computer
17. Inertial Sensors Laboratory
18. Hexapod Robot Laboratory Introduction to embedded systems and robotic platforms
Designed for students to become familiar with the BASIC Atom programming language
Students have to write their own routines to make Hexapod follow patterns in several ways to get students thinking about autonomous systems
19. Hexapod Robot Laboratory Lab Equipment
Lynxmotion CH3 Hexapod Robot
BasicATOM Bot Board
SSC-32 board
Basic Atom
Topic of Student
Project in 2009 and
Demo after this talk
20. Lego Mindstorms Educational Outreach Interest youth in engineering, science, and robotics
Introduce NXT equipment and prepare students for 1st Year Lego League competition
Familiarize students with NXT Lego Mindstorms software
Write simple programs and download them to command the robot
Use sensors to help a robot maneuver around objects
21. Conclusion The Aerospace Department�s Sensors and Actuators Lab uses NI tools and equipment to achieve its objectives
A graduate course was created emphasizing hardware experimentation that has been highly rated by students (4.3/5.0)
Lab development is ongoing and we welcome opportunities to work with National Instruments
22. Live Demo! You Will See:
Inertial Measurement Unit Laboratory
Hexapod Robot Final Project
Lego NeXT Aerospace Robotics Course
Contact Information
Glenn Lightsey, Professor
The University of Texas at Austin
lightsey@mail.utexas.edu
(512) 471-5322