Download
1 / 1
10 likes | 86 Views
Why unmanned? Lower labor costs Lower weight - Less ground damages - Less emissions. Autonomous Navigation in Forest Environment. THE VISION OF FORESTRY 2015?. GOALS FOR THE PILOT PROJECT : A prototype for a forest vehicle, capable of: Learning a path run by a human operator

E N D
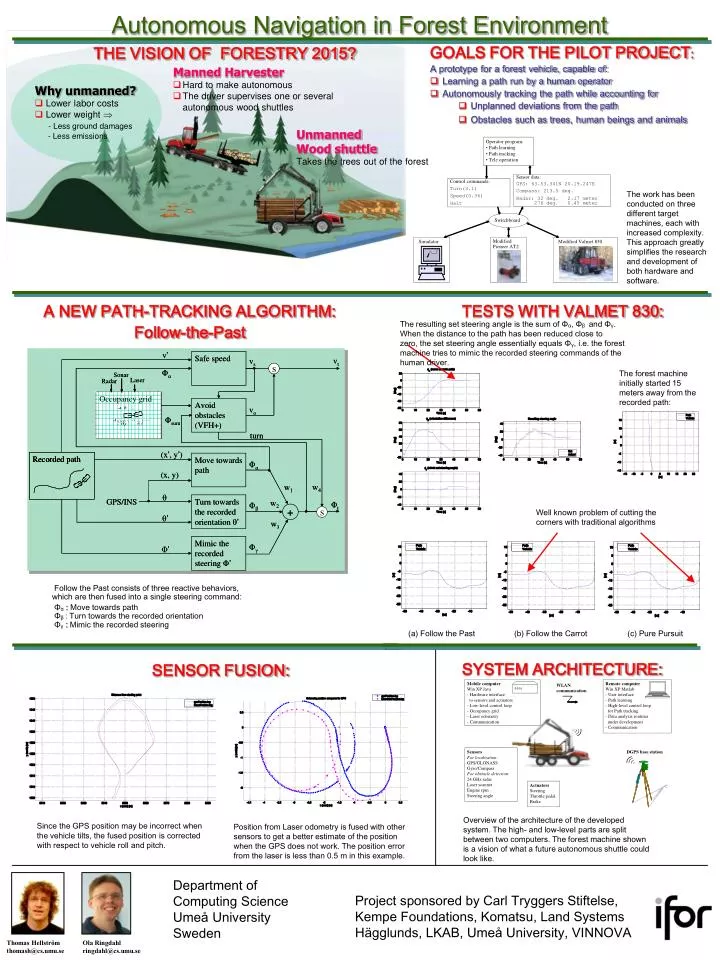
Why unmanned? • Lower labor costs • Lower weight - Less ground damages - Less emissions Autonomous Navigation in Forest Environment THE VISION OF FORESTRY 2015? GOALS FOR THE PILOT PROJECT: A prototype for a forest vehicle, capable of: • Learning a path run by a human operator • Autonomously tracking the path while accounting for • Unplanned deviations from the path • Obstacles such as trees, human beings and animals • Manned Harvester • Hard to make autonomous • The driver supervises one or severalautonomous wood shuttles • Unmanned Wood shuttle • Takes the trees out of the forest The work has been conducted on three different target machines, each with increased complexity. This approach greatly simplifies the research and development of both hardware and software. TESTS WITH VALMET 830: A NEW PATH-TRACKING ALGORITHM: Follow-the-Past The resulting set steering angle is the sum of Φα, Φβ and Φγ.When the distance to the path has been reduced close to zero, the set steering angle essentially equals Φγ, i.e. the forest machine tries to mimic the recorded steering commands of the human driver. The forest machine initially started 15 meters away from the recorded path: Well known problem of cutting the corners with traditional algorithms Follow the Past consists of three reactive behaviors, which are then fused into a single steering command: Φα : Move towards pathΦβ: Turn towards the recorded orientationΦγ : Mimic the recorded steering (a) Follow the Past (b) Follow the Carrot (c) Pure Pursuit SYSTEM ARCHITECTURE: SENSOR FUSION: Overview of the architecture of the developed system. The high- and low-level parts are split between two computers. The forest machine shown is a vision of what a future autonomous shuttle could look like. Since the GPS position may be incorrect when the vehicle tilts, the fused position is corrected with respect to vehicle roll and pitch. Position from Laser odometry is fused with other sensors to get a better estimate of the position when the GPS does not work. The position error from the laser is less than 0.5 m in this example. Department of Computing Science Umeå University Sweden Project sponsored by Carl Tryggers Stiftelse, Kempe Foundations, Komatsu, Land SystemsHägglunds, LKAB, Umeå University, VINNOVA Thomas Hellström thomash@cs.umu.se Ola Ringdahl ringdahl@cs.umu.se