Download
1 / 1
10 likes | 149 Views
Human Detection in RGBD using Histogram of Gradients and Curvature Shayan Modiri Assari † ( smodiri@eecs.ucf.edu ) , Zach Robertson † ( zachrobertson@knights.ucf.edu ) † University of Central Florida. 1. Problem Human Detection:

E N D
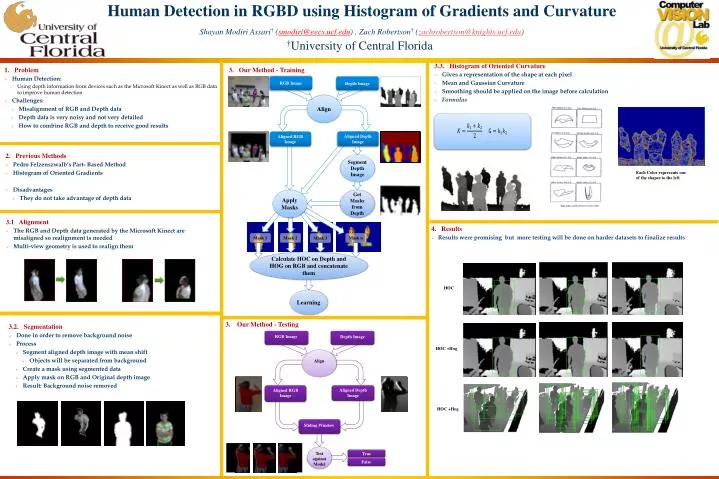
Human Detection in RGBD using Histogram of Gradients and CurvatureShayan Modiri Assari† (smodiri@eecs.ucf.edu) , Zach Robertson† (zachrobertson@knights.ucf.edu)†University of Central Florida • 1. Problem • Human Detection: • Using depth information from devices such as the Microsoft Kinectas well as RGBdata to improve human detection • Challenges: • Misalignment of RGB and Depth data • Depth data is very noisy and not very detailed • How to combine RGB and depth to receive good results 3. Our Method - Training • 3.3. Histogram of Oriented Curvature • Gives a representation of the shape at each pixel • Mean and Gaussian Curvature • Smoothing should be applied on the image before calculation • Formulas RGB Image Depth Image Align Aligned Depth Image Aligned RGB Image • 2. Previous Methods • Pedro Felzenszwalb’s Part- Based Method • Histogram of Oriented Gradients • Disadvantages • They do not take advantage of depth data Segment Depth Image Each Color represents one of the shapes to the left Get Masks from Depth Apply Masks • 3.1 Alignment • The RGB and Depth data generated by the Microsoft Kinect are misaligned so realignment is needed • Multi-view geometry is used to realign them • 4. Results • Results were promising but more testing will be done on harder datasets to finalize results Mask 2 Mask 1 Mask n Mask 3 … Calculate HOC on Depth and HOG on RGB and concatenate them HOC Learning 3. Our Method - Testing • 3.2.Segmentation • Done in order to remove background noise • Process • Segment aligned depth image with mean shift • Objects will be separated from background • Create a mask using segmented data • Apply mask on RGB and Original depth image • Result: Background noise removed RGB Image Depth Image HOC +Hog Align Aligned Depth Image Aligned RGB Image HOC +Hog Sliding Window Test against Model True False