Download
1 / 19
190 likes | 311 Views
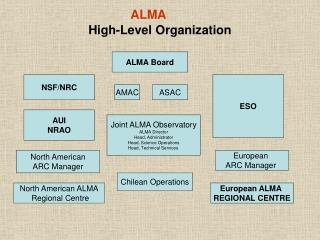
Advanced Lane Management Assist (ALMA) for Partially and Fully Automated Vehicles. Robert L. Gordon, P.E. Purpose of ALMA.

E N D
Advanced Lane Management Assist (ALMA) for Partially and Fully Automated Vehicles Robert L. Gordon, P.E.
Purpose of ALMA In connection with limited access highways ALMA* assists conventionally driven vehicles as well as partially and fully automated vehicles to provide decision support for lane selection and target speed for the selected lane. *Patent pending
Automated Vehicle Classification Scheme • No-Automation (Level 0): The driver is in complete and sole control of the primary vehicle controls – brake, steering, throttle, and motive power – at all times. • Function-specific Automation (Level 1): Automation at this level involves one or more specific control functions. Examples of single functions include adaptive cruise control and lane centering. • Combined Function Automation (Level 2): This level involves automation of at least two primary control functions such as those described under Level 1 designed to work in unison to relieve the driver of control of those functions. • Limited Self-Driving Automation (Level 3): Vehicles at this level of automation enable the driver to cede full control of all safety-critical functions under certain traffic or environmental conditions and in those conditions to rely heavily on the vehicle to monitor for changes in those conditions requiring transition back to driver control. The driver is expected to be available for occasional control, but with sufficiently comfortable transition time. The Google car is an example of limited self-driving automation. • Full Self-Driving Automation (Level 4): The vehicle is designed to perform all safety-critical driving functions and monitor roadway conditions for an entire trip. Such a design anticipates that the driver will provide destination or navigation input, but is not expected to be available for control at any time during the trip. This includes both occupied and unoccupied vehicles.
Why is Lane Selection and Target Speed a Key Issue? • Necessary for driver to select lane and target speed for limited access highways • Currently the selection is done more or less subconsciously • As lane choices become more complex and vehicle automation levels increase, some level of decision support assistance will be required Vehicle Navigation (links on route defined) ALMA Selection of lane and target speed Vehicle Control Merge, lateral control, longitudinal control
Lane selection decisions are becoming more complex due to more intensive use of lane management techniques in the future by highway operators • Tolling of some lanes on a freeway but not others • Tolls varying with time of day or traffic conditions • Use of shoulders varies with time of day or traffic conditions • Speed limits that vary with time of day or traffic conditions to assist in queue control, incident management and construction (speed harmonization) • More frequent use of closely spaced lane control signals to assist in construction and incident management and other traffic control needs • FHWA terms many of these strategies “Active Demand and Traffic Management”
Issues That Affect Lane Selection • Must be allowable (proper class of vehicle, number of passengers) • Toll, if any, must be acceptable • Lane must be open for some distance downstream (no incidents, construction, lane drop) • Lane consistent with exit point • Speed consistent with desired motorist speed (see next slide)
Speed Related Lane Selection Issues • Happy with speed in current lane? • Better match in another lane? • Will the target lane target lane support the better match for some distance ahead? • Is there likely to be an appropriate gap to enter the desired lane?
Current Lane Selection Techniques • Conventional Vehicles • Motorist does not get a detailed picture of what is ahead in other lanes. • Leads to lane switching that does not accomplish objective • Unnecessary lane switching causes non-productive maneuvers and wastes fuel • Unnecessary lane switching causes more crashes than would otherwise be the case • Partially and Fully Automated Vehicles Vehicle mounted sensors and connected vehicle techniques do not provide a sufficiently far “look ahead “ to address these issues
Information from Traffic Management Centers (TMCs) Can Assist • TMCs have a wealth of information that can assist • This information is currently boiled down and simplified for easy dissemination, but more detailed information is often available, particularly lane oriented information to address lane selection issues • Slides shown later will describe how ALMA conditions TMC information to assist in lane and target speed selection
What Does ALMA Do? • Using lane based information from TMCs, ALMA conditions this information and provides it in a form to enable the vehicle software to make these decisions. Vehicle software provides a recommended lane and a target speed as well as other information based on downstream roadway conditions. Determines whether adjacent lane conditions will support an easy and useful lane change. • Provides the information in a geographic reference frame that is consistent with when and where this information is needed. The reference frame is coordinated with highway characteristics, locations of traffic control devices and variable message signs. Concept illustrated in a later slide.
Information ALMA Provides to Vehicle • Current Regulatory Conditions • Current lane use requirements (vehicle types, vehicle restrictions, passengers needed, use of shoulders (may vary with traffic conditions or time) • Current speed limits (may vary with time and/or traffic conditions) • Current toll requirements and toll tag requirements (many new toll installations do not accept cash) • Lane Closure Information Displayed by Lane Control Signals and Variable Message Signs • Traffic Condition Information (see next slide)
Traffic Condition Information Provided by ALMA Lane based traffic information provided by ALMA when TMCs provide suitable information: • Lane speed (MPH) • Volume (Vehicles/hr/lane) • Average vehicle time headway (hrs/vehicle/lane) • Average vehicle length in a lane • Density (vehicles/mi/lane) • Passenger car equivalents (PCE)/lane – passenger car equivalents /hour/lane Lane selection guidance in the vehicle uses these variables to provide lane and speed selection guidance for issues previously described
Roadway Segmentation for Information Delivery ALMA provides information using the following geometric structure: • Barrel – A fairly long section of freeway with similar geometric and lane use characteristics • Zone – A fairly short section of freeway. Boundaries may be determined by locations of control devices or by roadway sections with similar traffic flow characteristics
Example of ALMA Geographic Relationships - Barrel 1Southern State Parkway Westbound - Nassau County, NY Sheet 1 Barrel 1 Characteristics Length – Approximately 9.5 miles Number of entries - 17 Number of exits – 19 Number of detector stations in barrel – 23 Number of variable message signs in barrel – 3 Number of ALMA zones in Barrel 1 - 25 See sheet 1 details on next slide
ALMA Source Data Most large metropolitan areas have a robust limited access highway traffic management system. They contain motorist communication devices, variable message signs (VMS), traffic flow detectors, CCTV cameras and other devices. The traffic management center (TMC) hosts a robust traffic management system that monitors and controls the field equipment. TMC functions are described in next slide.
Basic TMC Functions • Monitor traffic incidents and assist emergency responders in clearance. • Change traffic controls and informational messages as necessary to facilitate incident clearance and manage traffic flow. Enter incident clearance progress into computer screens. • Display travel conditions (often including travel time) to motorists via on-highway devices and on web sites. • Collect and archive data. Much more detailed information is available at the TMC than that displayed to motorists. Some of it is used for project and performance evaluation, development of operational and design improvements, and for research.
Robert L. Gordon 36 Stauber Drive Plainview, N.Y. 11803 (516)-938-2498 rob.gordon3@verizon.net