Download
1 / 20
200 likes | 515 Views
Batch Scheduling of Conflicting Jobs. Hadas Shachnai The Technion. Based on joint papers with L. Epstein, M. M. Halldórsson and A. Levin. . Batch Scheduling Problems. A batch is a set of jobs that can be processed jointly

E N D
Batch Scheduling of Conflicting Jobs Hadas Shachnai The Technion Based on joint papers with L. Epstein, M. M. Halldórsson and A. Levin.
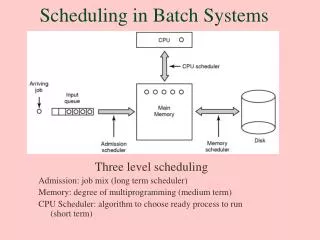
Batch Scheduling Problems • A batch is a set of jobs that can be processed jointly • The completion time of a batch is the latest completion time of a job in the batch. • In the p-batch model, the length of a batch is the maximum processing time of any job in the batch. • The jobs are processed on a batching machine which can process up to b jobs simultaneously. • Objective functions • Sum of completion times of jobs • Sum of batch completion times • Makspan
A B E C B,C need some shared resource D Lengths = color requirements Batch Scheduling of Conflicting Jobs • But, what if some jobs cannot be scheduled simultaneously? • Real-life examples: Conflicting resource requirements, compatibility/cooperation among jobs etc. • Such conflicts are often modeled by an undirected graph. A schedule - A multicoloring of G.
Batch Scheduling of Conflicting Jobs Machines 1 2 3 4 5 6 7 time • Given is an undirected graph G=(V,E) • Each vertex v V has a positive length. • Find a proper batch coloring of the graph: each batch is assigned a distinct contiguous set of colors of size equal to the maximum length of any vertex in the batch. • Each batch is an indepndent set in G G • Minimize • sum of job completion times (SJC) • sum of batch completion times (SBC) • Makespan (Max coloring) SJC(I)=2*2+1+2*5+3+7=25
Batch Scheduling of Conflicting Jobs Machines 1 2 3 4 5 6 7 time • Given is an undirected graph G=(V,E) • Each vertex v V has a positive length. • Find a proper batch coloring of the graph: each batch is assigned a distinct contiguous set of colors of size equal to the maximum length of any vertex in the batch. • Each batch is an indepndent set in G G • Minimize • sum of job completion times (SJC) • sum of batch completion times (SBC) • Makespan (Max coloring) SBC(I)=3*2+3*5+7=28 Max-col (I)=7 5
Known Results • For general graphsBSC and Max-coloring are hard to approximate within factor n1-εunless NP=ZPP (Bar-Noy et al, 1998; Feige and Kilian, 1998) • Sum of job completion times • Constant factor approximations for certain subclasses of conflict graphs (e.g., perfect, interval, line and bipartite graphs (Epstein, Halldórsson, Levin, S, 2006). • EPTASs for planar graphs and graphs with bounded treewidth (Halldórsson and S., 2008)
Known Results (Cont’d) • Sum of batch completion times • A 4ρ-approximation for SBC for graph classes on which Maximum Independent Set can be approximated within factor ρ, for some ρ≥1 (Epstein, Halldórsson, Levin, S, 2006). • Max coloring • Constant factor approximation algorithms for bipartite, planar, interval and perfect graphs (Epstein and Levin,2007; Escoffier at al., 2006; Pemmaraju et al., 2004; Pemmaraju and Raman, 2005) • PTASs for graphs with bounded treewidth (Escoffier at al., 2006;Pemmaraju and Raman, 2005) • Solvable in ploynomial time on paths (Halldórsson and S., 2008)
Batch Coloring Problems with Minsum Objective - a General Technique • Minimize sum of job completion times • Unbounded model (b ≥ n) • Obtain approximation algorithms for SJC on several classes of conflicts graphs
A simple guessing game • Player A decides on a number x. • Player B tries a sequence x1, x2, ..., of guesses until it finds xi that Player A says satisfies xi ≥ x. • The value of the game is the performance ratio
A simple deterministic strategy • Guess 1, 2, 4, 8, 16, ... • Performance ratio of 4: • The last number is at most 2x • The previous numbers are a geometric series, at most x. • This is also best possible...deterministic.
A randomized strategy • Defeat the worst-case instance by • changing the base of the geometric series • randomizing the initial guess [0,1) • For this game, set base to be e • Define guess xi = ei+, i ≥0. +1 +2 +3 +4 0 log length • - Last guess e-1 times optimal guess • - Achieves performance ratio of e.
V1 V2 V3 V4 V5 length Geometric Grouping in Coloring • Each vertex has a real value attached • Divide the real line into geom. increasing segments • Each group solved separately. • Subsolutions are pasted together in order to produce final solution Solve efficiently in terms of OPT: - Length based: immediate - LP based: bound clique number of the induced subgraph Each block must be solved with a small makespan A(V1) A(V3) A(V5).. A(V2) A(V4)
Bounds for Perfect and Line Graphs Preprocessing the input I: • Pick a random number ~ U[0,1). • Partition the jobs into classes by their processing times: J0= { j: pj ≤ e}and Ji={ j: ei-1+ < pj ≤ ei+ }. • Let k be the largest index of any non-empty class. • For all i=0,1, …, k, round up the processing time of each job j Ji to p’j=ei+ . The resulting input is I’. Lemma (preprocessing): Let OPT, OPTbe the sum of completion times of an optimal solution for I and I’, such that in I’ the jobs are scheduled in batches, and all jobs in a batch have a common class. Then E[OPT]≤e·OPT, where the expectation is over the random choices of .
Using Non-preemptive Scheduling Scheme Problem: Given an instance J= {1, …, n} of dependent jobs, with the conflict graph G=({V= 1, … , n}, E), schedule the jobs non-preemptively on a set of (unbounded size of) machines so as to minimize the sum of completion times of all jobs. Linear programming formulation: • For any edge (u,v)E there is a variable uv{0,1}; uv=1 if u precedes v in the schedule, and 0 otherwise. • Denote by Nv the set of neighbors of v in G. • Denote by C1, …, CNv the set of maximal cliques in Nv.
LP formulation (Cont’d) (LP) minimize fv vV subject to: fv ≥ pv+ puuv, for all vV,1 r Nv uv + vu ≥ 1 for all (u,v) E uCr Let fv*denote the completion time of job Jv in the optimal solution for LP.
Non-preemptive Scheduling Scheme • Partition the jobs to blocks of geometrically increasing sizes by the fv*values. • Apply to each block Vkan algorithm A for non-preemptive multicoloring, so as to minimize the total number of colors used. • Concatenate the schedules obtained for the blocks: first the schedule for V0, then the schedule for V1and so on… • Let OPT*= v fv*, w(Vk) is the maximum size of a clique in Vk, and suppose that A(Vk) ß w(Vk). Theorem (Non-pre-scheduling):The LP scheme gives a non-preemptive schedule in which the sum of start times of the jobs is at most 3.591 ß OPT* - p(V)/2, where p(V)= v pv .
Approximation Algorithm JB for SJC • Apply the Preprocessing step for partitioning J to job classes by rounded processing times. • For any pair of jobs Ji, Jj that belong to different classes, add an edge (i,j) in the conflict graph G. Denote the resulting graph G'. • Solve LP for the input jobs with rounded processing times and conflict graph G'. • Partition the jobs in the input into blocks V0,V1, …, VL, by their LP completion times. • Schedule the blocks in sequence using for each block a coloring algorithm for unit length jobs.
Analysis of the Algorithm Theorem 2: JBapproximates SJC within a factor of 9.76 ß + (1 – (e-1)/2) 9.76 ß + 0.14 • In general, LP may not be solvable in polynomial time on G’; can be solved when the maximum weight clique problem is solvable on G.
Analysis of the Algorithm (Cont’d) • In particular, maximum weighted clique and coloring are polynomially solvable on perfect graphs. Corollary 1: JB is a 9.9-approximation algorithm for SJC on perfect graphs. • In a line graph there are at most n maximal cliques; also, using Vizing’s theorem, ß= 1+ o(1). Corollary 2: JB is a 9.9+ o(1)-approximation algorithm for SJC on line graphs.
Summary and Open problems • Interesting features of the current results: Randomized strategy is combined in many ways • K-colorable subgraphs (interval,compar.) • LP values + lengths (line, perfect) • NP-hardness for partial k-trees, trees, paths? • Any non-trivial graph classes that are polynomially solvable (beyond stars)? • Better ratios… Thank you