Download
1 / 12
130 likes | 836 Views
Introduction. P. A. ω 2. O 4. V t AO 2. O 2. O V. A. V t AO 4. V s AO 4. Velocity Polygon for a Crank-Slider Mechanism This presentation shows how to construct the velocity polygon for a crank-slider (inversion 2) mechanism.

E N D
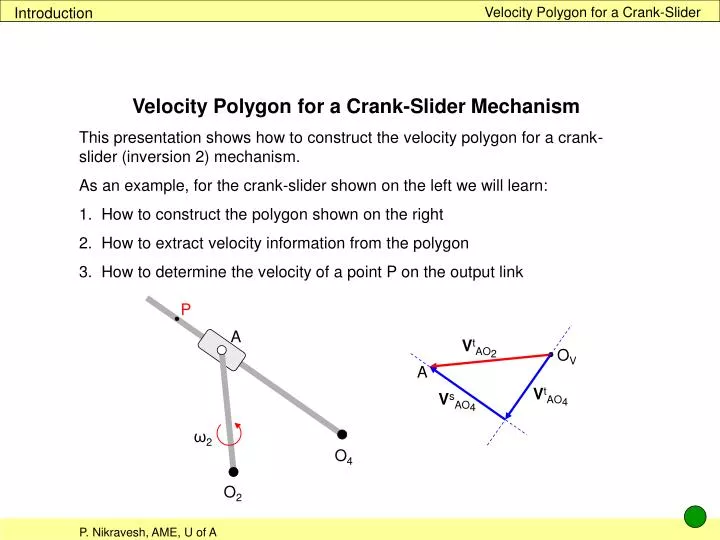
Introduction Velocity Polygon for a Crank-Slider P A ω2 O4 VtAO2 O2 OV A VtAO4 VsAO4 Velocity Polygon for a Crank-Slider Mechanism This presentation shows how to construct the velocity polygon for a crank-slider (inversion 2) mechanism. As an example, for the crank-slider shown on the left we will learn: How to construct the polygon shown on the right How to extract velocity information from the polygon How to determine the velocity of a point P on the output link
Inversion 2 Velocity Polygon for a Crank-Slider P A ω2 O4 O2 Inversion 2 This example shows the construction of the velocity polygon for the second inversion of a crank-slider. In addition, this example shows how to find the velocity of a point P on the output link. Two methods will be presented for constructing the velocity polygons and also two methods will be presented for determining the velocity of point P. Like any other system, it is assumed that all the lengths are known and the system is being analyzed at a given configuration. Furthermore, it is assumed that the angular velocity of the crank is given.
Vector loop: method 1 Velocity Polygon for a Crank-Slider Vector loop: method 1 We define three position vectors to obtain a vector loop equation: RAO2 = RO4O2 + RAO4 RAO2 has a constant length but varying direction. Therefore its time derivative is a tangential velocity: VAO2 = VtAO2 RO4O2 has constant length and direction. Its time derivative is zero: VO4O2 = 0 RAO4 has varying length and direction. Its time derivative consists of two components: a tangential velocity and a slip velocity: VAO4 = VtAO4 + VsAO4 ► A RAO4 RAO2 ω2 O4 RO4O2 O2 Then, the velocity equation is: VtAO2 = VtAO4 + VsAO4
Velocity polygon: method 1 Velocity Polygon for a Crank-Slider VtAO2 = VtAO4 + VsAO4 We calculate VtAO2 : VtAO2 = ω2∙ RAO2 The direction is found by rotating RAO2 90° in the direction of ω2 The direction of VtAO4 is perpendicular to RAO4 The direction of VsAO4 is parallel to RAO4 Now we can draw the velocity polygon: VtAO2 is added to the origin VtAO4 starts at OV VsAO4 ends at A We construct the polygon VtAO2 A RAO4 RAO2 ω2 ► O4 RO4O2 O2 ► ► VtAO2 OV A ► VtAO4 VsAO4 ► ► ►
Angular velocities: method 1 Velocity Polygon for a Crank-Slider We can determine ω4: ω4 = VtAO4 / RAO4 RAO4 has to be rotated 90° counterclockwise to point in the same direction as VtAO4. Therefore ω4 is ccw ω3 is equal to ω4, since the sliding joint prohibits any relative rotation between link 3 and link 4. VtAO2 A RAO4 ω4 RAO2 ω2 O4 ► RO4O2 O2 VtAO2 OV A VtAO4 VsAO4
Vector loop: method 2 Velocity Polygon for a Crank-Slider Vector loop: method 2 In this method we introduce an extra position vector in the vector loop equation. We note that A is a point on link 2 and link 3. A4 is a point on link 4 that has the same position as A As the crank rotates A will move away from A4. We define four position vectors to obtain a vector loop equation: RAO2 = RO4O2 + RA4O4 + RAA4 RAA4 has zero length We take the time derivative to perform a velocity analysis: VAO2 = VO4O2 + VA4O4 + VAA4 RAA4 A4 A RA4O4 RAO2 ► ► ► ω2 O4 RO4O2 O2 ► ►
Velocity equation: method 2 Velocity Polygon for a Crank-Slider VAO2 = VO4O2 + VA4O4 + VAA4 RA2O2 has constant length but varying direction. That means VAO2 is a tangential velocity. RO4O2 has constant length and direction; VO4O2 equals 0. RA4O4 has constant length but varying direction. Therefore VA4O4 is a tangential velocity. RAA4 has varying length and direction. That means VAA4 has two components: VAA4 = VtAA4 + VsAA4 The result is: VtAO2 = VtA4O4 + VtAA4 + VsAA4 RAA4 A RA4O4 RA2O2 ω2 O4 RO4O2 O2 VtAA4 is proportional to the length of RAA4 which is zero: VtAA4 = 0 Therefore, the velocity equation becomes: VtAO2 = VtAO4 + VsAA4
Velocity polygon: method 2 Velocity Polygon for a Crank-Slider VtAO2 = VtA4O2 + VsAA4 We calculate VtAO2: VtAO2 = ω2∙ RAO2 The direction is found by rotating RAO2 90° in the direction of ω2 The direction of VtA4O4 is perpendicular to RA4O4 The direction of VsAA4 is parallel to link 4 Now we can draw the velocity polygon: VtAO2 is added to the origin VtA4O4 starts at OV VsAA4 ends at A We construct the polygon RAA4 VtAO2 A RA4O4 RAO2 ω2 ► O4 RO4O2 O2 ► ► VtAO2 OV A VtA4O4 VsAA4 ► A4 ► ► ►
Angular velocities: method 2 Velocity Polygon for a Crank-Slider We can determine ω4: ω4 = VtA4O4 / RA4O4 RA4O4 has to be rotated 90° counterclockwise to point in the same direction as VtA4O4. Therefore ω4 is ccw ω3 equals ω4, since the sliding joint prohibits any relative rotation between link 3 and link 4. RAA4 VtAO2 A RA4O4 RAO2 ω4 ω2 ► O4 RO4O2 O2 VtAO2 OV A VtA4O4 VsAA4 A4
Velocity polygons Velocity Polygon for a Crank-Slider VtAO2 OV VtAO2 OV A A VtA4O4 VsAA4 VtAO4 VsAO4 A4 Note that the velocity polygons that are obtained from the two methods are identical. The difference is in how the vectors are labeled and viewed. Viewing point A as two separate points (but coinciding), one on link 2 (or 3) and one on link 4, can be helpful in realizing the sliding velocity component in rotating bodies connected by a slider.
Velocity of point P: method (a) Velocity Polygon for a Crank-Slider Velocity of point P: method (a) After finding the angular velocity of link 4, whether from method 1 or method 2, we can determine the velocity of point P. We define a position vector RPO4 RPO4 has constant length, but varying direction. That means VPO4 is a tangential velocity: VPO4 = VtPO4 We can calculate its magnitude as: VtPO4 = ω4∙ RPO4 The direction is found by rotating RPO4 90° in the direction of ω4 P A RPO4 VPO4 ω4 ► ω2 O4 O2 ►
Velocity of point P: method (b) Velocity Polygon for a Crank-Slider Velocity of point P: method (b) This process can be followed after we find the velocity polygon from either method 1 or method 2. We note that P, A4 and O4 lie on the same line on link 4. That means they also lie on the same line on the velocity polygon. The ratio PA4 / A4O4 on link 4 must be equal to PA4 / A4OV on the velocity polygon. We can measure it on the mechanism; e.g., PA4 / A4O4 = PA4 / A4OV = 0.32 Next we use this ratio to calculate the distance PA4 on the velocity polygon as: PA4 = 0.32 ∙ A4OV Now we draw VPO4. It starts at the origin and ends at P PA4 P A A4O4 ω4 ω2 O4 O2 ► VtAO2 OV A A4OV A4 VtPO4 PA4 P ► ►