Download
1 / 48
480 likes | 667 Views
VE Input Devices. Doug Bowman Virginia Tech. Goals and Motivation. Provide practical introduction to the input devices used in VEs Examine common and state of the art input devices look for general trends spark creativity Advantages and disadvantages

E N D
VE Input Devices Doug Bowman Virginia Tech
Goals and Motivation • Provide practical introduction to the input devices used in VEs • Examine common and state of the art input devices • look for general trends • spark creativity • Advantages and disadvantages • Discuss how different input devices affect interface design
Input devices • Hardware that allows the user to communicate with the system • Input device vs. interaction technique • Single device can implement many ITs
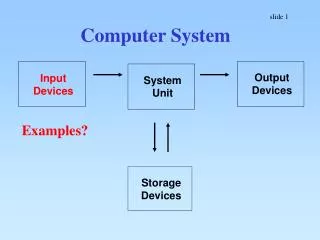
ITs Human-computer interface User interface software Input devices System Software Output devices User
Human-VE interface Env. model Display(s) Simulation loop: -render -check for events -respond to events -iterate simulation -get new tracker data Tracking system Input device(s)
Input device characteristics • Degrees of Freedom (DOFs) & DOF composition (integral vs. separable) • Range of reported values: discrete/continuous/hybrid • User action required: active/passive/hybrid • Intended use: locator, valuator, choice, … • Frame of reference: relative vs. absolute • Properties sensed: position, motion, force, …
Practical classification system • Desktop devices • Keyboards, 2D mice and trackballs, pen-based tables, joysticks, 6DOF devices for the desktop • Tracking devices • 3D mice • Special-purpose devices • Direct human input
Desktop devices: keyboards • Chord keyboards1 • Arm-mounted keyboards2 • “Soft” keyboards (logical devices)
Desktop devices: 6-DOF devices • 6 DOFs without tracking • Often isometric • Exs: Fig. 4.4 SpaceBall 5000, SpaceMouse Plus, SpaceOrb
Motion Tracking • Critical characteristics • Range, latency, jitter (noise or instability), and accuracy • Different motion trackers • Magnetic • Mechanical • Acoustic • Inertial • Optical • Hybrid
Electromagnetic trackers • Exs: Polhemus Fastrak, Ascension Flock of Birds • Most common • Used with conventional monitors (for fishtank VR) Small workbench displays • Transmitter • Receiver(s) • Noisy • Affected by metal objects -> distort the magnetic field
Inertial trackers • Exs: Intersense IS-300, Intertrax2 • Less noise, lag • Only 3 DOFs (orientation)
Exs: Vicon, HiBall, ARToolkit Advantages accurate can capture a large volume allow for untethered tracking Disadvantages may require light emitting diodes(LEDs) image processing techniques occlusion problem Optical/vision-based trackers
Hybrid tracking • Ex: IS-600 / 900 • inertial (orient.) • acoustic (pos.) • additional complexity, cost
Tracking devices: bend-sensing gloves • CyberGlove7, 5DT • Reports hand posture • Gesture: • single posture • series of postures • posture(s) + location or motion
Tracking devices: pinch gloves • Conductive cloth at fingertips • Any gesture of 2 to 10 fingers, plus combinations of gestures • > 115,000 gestures
Case study: Pinch Gloves • Pinch gloves are designed to be a combination device (add a position tracker) • Very little has been done with Pinch Gloves in VEs - usually 1 or 2 gestures for: • Object selection • Tool selection • Travel
Characteristics of Pinch Gloves • Relatively low cost • Very light • User’s hand becomes the device • User’s hand posture can change • Allow two-handed interaction • Huge number of possible gestures
Characteristics of Pinch Gloves II • Much more reliable than data gloves • Support eyes-off input • Can diminish “Heisenberg effect” • Support context-sensitive gesture interpretation
Pinch Gloves in SmartScene13 • Lots of two-handed gestures • Scale world • Rotate world • Travel by “grabbing the air” • Menu selection
Pinch Gloves for menus • TULIP system14 • ND hand selects menu, D hand selects item within menu • Limited to comfortable gestures • Visual feedback on virtual hands
Pinch Gloves for text input • Pinch Keyboard14 • Emulate QWERTY • Pinch finger to thumb to type letter under that finger • Move/rotate hands to change active letters • Visual feedback
3D mice • Ring Mouse • Fly Mouse • Wand • Cubic Mouse • Dragonfly • …
Special-purpose devices: using conductive cloth • Virtual toolbelt • Used to select virtual tools • Good use of proprioceptive cues • Interaction slippers3 • Step on displayed options • Click heels to “go home”
Human input: speech • Frees hands • Allows multimodal input • No special hardware • Specialized software • Issues: recognition, ambient noise, training, false positives, …
More human input • Breathing device - OSMOSE • Brain-body actuated control • muscle movements • thoughts!
Treadmills Stationary cycles VMC / magic carpet Walking/flying simulations (use trackers) Locomotion devices
UNIPORT • First Locomotion Device For U.S. Army (1994) • Proof-of-concept demonstration • Developed in six weeks • Difficult to change direction of travel • Small motions such as side-stepping are impossible
Treadport • Developed in 1995 • Based on a standard treadmill with the user being monitored and constrained by mechanical attachment to the user’s waist • User actually walks or jogs instead of pedaling • Physical movement is constrained to one direction
Individual Soldier Mobility Simulator (Biport) • Most sophisticated locomotion device • Designed for the conduct of locomotion studies • Hydraulic-based locomotion driven w/ force sensors at the feet • Safeguards limited responsiveness • Too awkward to operate
Omni-Directional Treadmill15,16 • Most recently developed locomotion device for U.S. Army • Revolutionary device that enables bipedal locomotion in any direction of travel • Consists of two perpendicular treadmills • Two fundamental types of movement • User initiated movement • System initiated movement
Virtual Motion Controller17 • Weight sensors in platform sense user’s position over platform • Step in direction to move that direction • Step further to go faster
Walking in place18,19 • Analyze tracker information from head, body, feet • Neural network (Slater) • GAITER project (Templeman) • Shown to be better than purely virtual movement, but worse than real walking20
Input and output with a single device • Classic example - touch screen • LCD tablets or PDAs with pen-based input • Phantom haptic device • FEELEX haptic device21
PDA as ideal VE device?22 • Offers both input and output • Has on-board memory • Wireless communication • Portable, light, robust • Allows text / number input • Can be tracked to allow spatial input
Conclusions • When choosing a device, consider: • Cost • Generality • DOFs • Ergonomics / human factors • Typical scenarios of use • Output devices • Interaction techniques
Acknowledgments • Joe LaViola, Brown University, for slides and discussions • Ron Spencer, presentation on locomotion devices used by the Army
References • [1] Matias, E., MacKenzie, I., & Buxton, W. (1993). Half-QWERTY: A One-handed Keyboard Facilitating Skill Transfer from QWERTY. Proceedings of ACM INTERCHI, 88-94. • [2] Thomas, B., Tyerman, S., & Grimmer, K. (1998). Evaluation of Text Input Mechanisms for Wearable Computers. Virtual Reality: Research, Development, and Applications, 3, 187-199. • [3] LaViola, J., Acevedo, D., Keefe, D., & Zeleznik, R. (2001). Hands-Free Multi-Scale Navigation in Virtual Environments. Proceedings of ACM Symposium on Interactive 3D Graphics, Research Triangle Park, North Carolina, 9-15. • [4] Keefe, D., Feliz, D., Moscovich, T., Laidlaw, D., & LaViola, J. (2001). CavePainting: A Fully Immersive 3D Artistic Medium and Interactive Experience. Proceedings of ACM Symposium on Interactive 3D Graphics, Research Triangle Park, North Carolina, 85-93. • [5] Bowman, D., Wineman, J., Hodges, L., & Allison, D. (1998). Designing Animal Habitats Within an Immersive VE. IEEE Computer Graphics & Applications, 18(5), 9-13. • [6] Hinckley, K., Pausch, R., Goble, J., & Kassell, N. (1994). Passive Real-World Interface Props for Neurosurgical Visualization. Proceedings of CHI: Human Factors in Computing Systems, 452-458. • [7] Kessler, G., Hodges, L., & Walker, N. (1995). Evaluation of the CyberGlove(TM) as a Whole Hand Input Device. ACM Transactions on Computer-Human Interaction, 2(4), 263-283. • [8] LaViola, J., & Zeleznik, R. (1999). Flex and Pinch: A Case Study of Whole-Hand Input Design for Virtual Environment Interaction. Proceedings of the International Conference on Computer Graphics and Imaging, 221-225. • [9] Ware, C., & Jessome, D. (1988). Using the Bat: a Six-Dimensional Mouse for Object Placement. IEEE Computer Graphics and Applications, 8(6), 65-70. • [10] Zeleznik, R. C., Herndon, K. P., Robbins, D. C., Huang, N., Meyer, T., Parker, N., & Hughes, J. F. (1993). An Interactive 3D Toolkit for Constructing 3D Widgets. Proceedings of ACM SIGGRAPH, Anaheim, CA, USA, 81-84.
References (2) • [11] Balakrishnan, R., Fitzmaurice, G., Kurtenbach, G., & Singh, K. (1999). Exploring Interactive Curve and Surface Manipulation Using a Bend and Twist Sensitive Input Strip. Proceedings of the ACM Symposium on Interactive 3D Graphics, 111-118. • [12] Froehlich, B., & Plate, J. (2000). The Cubic Mouse: A New Device for Three-Dimensional Input. Proceedings of ACM CHI. • [13] Mapes, D., & Moshell, J. (1995). A Two-Handed Interface for Object Manipulation in Virtual Environments. Presence: Teleoperators and Virtual Environments, 4(4), 403-416. • [14] Bowman, D., Wingrave, C., Campbell, J., & Ly, V. (2001). Using Pinch Gloves for both Natural and Abstract Interaction Techniques in Virtual Environments. Proceedings of HCI International, New Orleans, Louisiana. • [15] Darken, R., Cockayne, W., & Carmein, D. (1997). The Omni-directional Treadmill: A Locomotion Device for Virtual Worlds. Proceedings of ACM Symposium on User Interface Software and Technology, 213-221. • [16] Iwata, H. (1999). Walking About Virtual Environments on an Infinite Floor. Proceedings of IEEE Virtual Reality, Houston, Texas, 286-293. • [17] Wells, M., Peterson, B., & Aten, J. (1996). The Virtual Motion Controller: A Sufficient-Motion Walking Simulator. Proceedings of IEEE Virtual Reality Annual International Symposium, 1-8. • [18] Slater, M., Usoh, M., & Steed, A. (1995). Taking Steps: The Influence of a Walking Technique on Presence in Virtual Reality. ACM Transactions on Computer-Human Interaction, 2(3), 201-219. • [19] Slater, M., Steed, A., & Usoh, M. (1995). The Virtual Treadmill: A Naturalistic Metaphor for Navigation in Immersive Virtual Environments, Virtual Environments '95: Selected Papers of the Eurographics Workshops (pp. 135-148). New York: SpringerWien. • [20] Usoh, M., Arthur, K., Whitton, M., Bastos, R., Steed, A., Slater, M., & Brooks, F. (1999). Walking > Walking-in-Place > Flying, in Virtual Environments. Proceedings of ACM SIGGRAPH, 359-364.
References (3) • [21] Iwata, H., Yano, H., Nakaizumi, F., & Kawamura, R. (2001). Project FEELEX: adding haptic surface to graphics. Proceedings of ACM SIGGRAPH, Los Angeles, 469-476. • [22] Watsen, K., Darken, R., & Capps, M. (1999). A Handheld Computer as an Interaction Device to a Virtual Environment. Proceedings of the Third Immersive Projection Technology Workshop. • [23] Zhai, S. (1998). User Performance in Relation to 3D Input Device Design. Computer Graphics, 32(4), 50-54.