Download
1 / 25
280 likes | 494 Views
以 CPLD 設計高精確度之馬達轉速量測系統. 指導老師 : 王明賢 學生 : 吳居峰 學號 :4972c089 資料來源 : 崑山科技大學學報第六期 第 1~12 頁(民國 98 年 4 月) Journal of Kun Shan University, No.6, pp.1~12 (April, 2009). 摘要. 由於科技之發展,高性能伺服馬達在工業應用上佔有不可或缺的角色。伺服馬達需 具備高精密度之轉速量測,但傳統轉速量測方法,是在固定時間內計算脈波數以算出馬 達轉速,在低轉速時會產生極大誤差,因此需要使用高脈波數但價格昂貴的編碼器

E N D
以CPLD 設計高精確度之馬達轉速量測系統 指導老師:王明賢 學生:吳居峰 學號:4972c089 資料來源:崑山科技大學學報第六期 第1~12 頁(民國98 年4 月) Journal of Kun Shan University, No.6, pp.1~12 (April, 2009)
摘要 • 由於科技之發展,高性能伺服馬達在工業應用上佔有不可或缺的角色。伺服馬達需 • 具備高精密度之轉速量測,但傳統轉速量測方法,是在固定時間內計算脈波數以算出馬 • 達轉速,在低轉速時會產生極大誤差,因此需要使用高脈波數但價格昂貴的編碼器 • (Encoder),嚴重墊高伺服馬達製造成本。為了改善這些缺點,本文提出以計算脈波寬之 • 方法實現高精確度之馬達轉速量測,此方法不需要使用高脈波數之精密編碼器,因此價 • 錢相對便宜。此方法以外加的高頻石英振盪器提供一個穩定頻率做為基頻,並與編碼器 • 的輸出脈波寬比較以獲得馬達轉速。其主要優點在於可提高轉速量測之精確度並縮短轉 • 速量測之時間,因而提高伺服馬達速度控制之性能。為了實現此方法,本文利用一個便 • 宜、體積小、易操作的複合型可編程邏輯元件(Complex Programmable Logic Device, • CPLD)設計高精確度之馬達轉速量測系統。經由無數次的實驗,證明本文所提方法具有 • 非常精確和穩定之量測特性。
一、簡介 • 隨著生活水準和科技應用的提升,伺服馬達在各種產業之應用越形重要[1-5]。隨著 • 這種趨勢的發展,各種伺服馬達向量控制方法[6, 7]、脈波調變(PWM)驅動控制法則[8, • 9]、無速度感測之伺服馬達控制[10, 11]和伺服馬達控制理論[12-17] 蓬勃的發展。這些 • 研究必然涉及高精確度之馬達轉速量測,因此需要使用高脈波數且高價位的編碼器 • (Encoder)以量測馬達轉速。
傳統的馬達轉速量測方式是在固定的量測時間內,計算編碼器的輸出脈波數,經計傳統的馬達轉速量測方式是在固定的量測時間內,計算編碼器的輸出脈波數,經計 算以獲得馬達轉速,如圖1 所示。馬達轉速可表示如下:
其中 T 為量測時間,K 為編碼器轉一圈的輸出脈波數,N 為量測時間量測到編碼器之輸出脈波數。
這種轉速量測方式在低轉速時會產生極大誤差,因此需要使用高輸出脈波數但價格這種轉速量測方式在低轉速時會產生極大誤差,因此需要使用高輸出脈波數但價格 • 昂貴的編碼器,其缺點約有下列幾點: • (1)在低轉速時量測誤差極大:例如以每轉一圈產生1000 個脈波的編碼器量測1 rps • (60rpm)的馬達轉速時,若量測的時間為10ms,則量測誤差約為10%。 • (2)量測時間極長:若要求量測誤差在5%以內時,則需將量測時間增加為20ms,如 • 此將造成量測時間極長的缺點,因而降低伺服馬達控制性能。 • (3)使用精密度較高的編碼器:若為了降低量測誤差和縮短量測時間,則需使用高精 • 密度、價格昂貴之高輸出脈波數編碼器。但如此一來又受限於馬達控制器的最高輸入頻 • 率,例如使用三菱的FX2N 系列PLC 時,PLC 的2 相2 編碼高速計數器最高頻率只可 • 到30 kHz,也就是說每秒輸入計數器的脈波數不能超過30000 個,若編碼器解析度為每 • 轉一圈產生10000 個脈波的話,那轉速就不能超30000/10000=3 rps,也就是說不能超過 • 3×60=180 rpm。這就意味著若為了在短的量測時間內,並提高量測的精確度,馬達轉速 • 的上限將被限制在較低的轉速上。
為了改善上述的缺點,本文提出以計算脈波寬之方法實現高精確度之馬達轉速量測,此方法不需要使用高脈波數之精密編碼器,價錢更相對便宜。此方法以外加的高頻石英振盪器提供一個穩定頻率做為基頻,並與編碼器的輸出脈波寬比較以獲得馬達轉速。此方法具備下列優點:為了改善上述的缺點,本文提出以計算脈波寬之方法實現高精確度之馬達轉速量測,此方法不需要使用高脈波數之精密編碼器,價錢更相對便宜。此方法以外加的高頻石英振盪器提供一個穩定頻率做為基頻,並與編碼器的輸出脈波寬比較以獲得馬達轉速。此方法具備下列優點: • (1)在低轉速時量測誤差極小:例如以每轉一圈產生1000 個脈波的編碼器量測1 rps • (60rpm)的馬達轉速時,若採用振盪頻率為4 MHz 的石英振盪器,量測5 個編碼器脈波 • 寬時,量測誤差約為0.005%。 • (2)量測時間極短:依前項之條件,量測5 個編碼器脈波寬的時間約為5ms,且當馬 • 達轉速越高時,所需的量測時間越短,與傳統方式比較後,具備量測時間較短的優點。 • (3)此方法以外加的高頻石英振盪器提供一個穩定頻率做為基頻,因此不受馬達控制器的最高輸入頻率的影響。例如當使用三菱的FX2N 系列的PLC 時,可以不用PLC 的 • 2 相2 編碼高速計數器,因此轉速量測不會受到最高頻率30 kHz 的限制。 • (4)本系統與傳統方式相較具備容易擴充及低成本的優點。 • 為了驗證本文所提方法之優越性與可行性,本文利用一個便宜、體積小、易操作的 • CPLD,設計高精確度之馬達轉速量測系統。經由無數次的實驗,證明本文所提之量測 • 方法有非常精確和穩定之特性,顯示此方法明顯優於傳統的轉速量測方式。
二、轉速量測系統原理 • 圖 2 為本文所提之馬達轉速量測方塊圖,假設編碼器產生的脈波頻率為f1,而石英 • 振盪器產生的脈波頻率為f2。此轉速量測原理首先是啟動計數控制訊號Vin 開始計數, • 然後設定量測五個編碼器輸出脈波寬停止計數,可得編碼器的輸出脈波數(N1=5),並 • 假設在五個編碼器輸出脈波寬時間內,共量得石英振盪器的輸出脈波數為N2。圖3 為編 • 碼器與石英振盪器的輸出信號圖,由圖可知編碼器的輸出脈波數(N1=5)與石英振盪 • 器的輸出脈波數N2 之比值,恰為編碼器輸出頻率f1 與石英振盪器輸出頻率f2 之比值, • 表示如下: • 而馬達轉速R 表示如下:
假設石英振盪器之輸出頻率為4 MHz,編碼器旋轉一圈產生的脈波數K=1000,並假設在編碼器的五個輸出脈波寬之量測期間內(N1=5),共量測到石英振盪器之輸出脈波數為N2=5000,則根據(3)式可得馬達轉速為: • 由於石英振盪器的輸出頻率(f2)遠大於編碼器的輸出脈波頻率(f1),因此可以獲得很 • 高的量測精確度,此在第四節之轉速量測誤差會有詳細敘述。
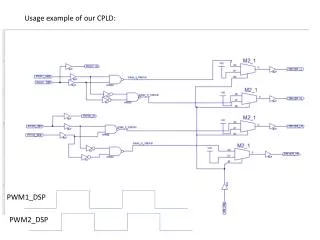
三、以CPLD實現轉速量測系統 • 為了驗証本文所提馬達轉速量測之可行性,我們以CPLD 設計一個轉速量測系統。 • 圖4 為以ALTERA 公司所生產的EPM3064ALC44-10 CPLD 設計轉速量測系統之電路 • 圖。此方法以外加的4MHz 石英振盪器提供一個穩定頻率做為基頻,並與編碼器的5 個 • 輸出脈波寬比較以獲得馬達轉速。在CPLD 電路中設計一個計數器74163,設定量測五 • 個編碼器輸出脈波寬時停止74163 計數,可得編碼器的輸出脈波數(N1=5)。並以四個 • 計數器74162 組成計數電路計算石英振盪器之輸出脈波數。並將計數器的結果以7447 • 構成的邏輯電路解碼,再經由四個七段顯示器顯示石英振盪器的輸出頻率或馬達轉速。 • 在本系統中,考慮到當馬達處於低轉速的情況下,因為石英振盪器的輸出頻率較 • 高,在計算編碼器的5 個輸出脈波寬時間內,可能造成計數器溢位而使得計數結果錯誤, • 此時只需適度提高CPLD 電路中計數器的位元數,即可避免此項錯誤,因此可以獲得很 • 正確的轉速量測。
圖 4 之轉速量測系統,其主要功能為計數及頻率比較。而外部電路則分三部份:(1)振盪電路:由石英振盪器構成,提供4MHz 的時脈信號(CLK1)。(2)計數控制訊號電路:當計數控制訊號VIN 由高態變為低態時,提供負緣觸發信號至CPLD 電路,並由CPLD 電路內規劃的7474 正反器將所有計數器歸零,以啟動計數。(3)顯示電路:如圖5 由四組的7447 IC 及七段顯示器構成之顯示電路圖,將CPLD的輸出解碼並驅動七段顯示器。
轉速量測系統的工作方式如下:當計數控制訊號由高態變為低態時,提供負緣觸發信號至CPLD 電路的VIN,CPLD 內部規劃的74163 計數器開始計算編碼器的脈波數目(CLK2),在圖4 之電路圖中,規劃74163 計算五個編碼器之輸出脈波後即停止計數,亦即N1=5。另外四組74162 計數器則在五個編碼器之輸出脈波計數期間內,同時計數石英振盪器提供的4MHz 信號(CLK1)。當74163 完成五個編碼器脈波計數時,除了本身停止計數,另外並產生一個高準位訊號將四組74162 計數器截止計數。因此可以分別得到N1 及N2 的脈波數,其中N1 代表編碼器的脈波數(本系統中N1 固定為五個脈波),N2 則代表4MHz 信號的脈波數,由CPLD 電路輸出給外部的顯示電路,並由顯示電路的四組7447 IC,將N2 脈波數解碼以驅動七段顯示器。系統量測所顯示的脈波數N2,根據(2)式即可算出編碼器的輸出頻率,或根據(3)式即可算出馬達的轉速。
四、轉速量測誤差 • 圖 6 所示為轉速量測訊號圖,其中圖6(a)表示量測到石英振盪器之完整周期輸出脈 • 波,圖6(b)表示量測到石英振盪器之不完整周期輸出脈波。假設在5 個編碼器脈波(N1 • =5)期間內,量測到石英振盪器之完整周期輸出脈波數為N2 如圖6(a)所示,則理論上轉 • 速量測毫無誤差。但大部分情況是在5 個編碼器脈波(N1=5)期間內,只能量測到石英振 • 盪器之不完整周期輸出脈波,如圖6(b)所示,因而量測到石英振盪器的輸出脈波數為 • N2-1,造成轉速量測誤差。 • 最大轉速量測誤差定義如下: • 將(2)式代入(4)式可得最大轉速量測誤差之另一種表示式為:
依據(4)式可知,當計數石英振盪器的脈波數N2 越大時,則轉速量測誤差越小。另外在圖4 所示之CPLD 轉速量測系統N1=5 和f2=4×106 ,因此依據(5)式可知,當編碼器的輸出脈波頻率f1 越高時,則最大轉速量測誤差越大,亦即馬達轉速越高時,最大轉速量測誤差越大。另外依據(5)式可知,為了減少轉速量測誤差,可以增加編碼器的輸出脈波量測數目N1 或提高石英振盪器的時脈頻率f2。
五、實驗結果 • 依據前述原理,以EPM3064ALC44-10 CPLD 所設計的轉速量測實驗系統如圖7 所 • 示,其中石英振盪器產生的脈波頻率為4 MHz,即f2=4 MHz,且設定當編碼器的輸出脈 • 波數N1=5 時,74163 計數器即停止計數。在實驗中以信號產生器產生的4 kHz 頻率來 • 模擬編碼器的輸出脈波信號,即f1=4 kHz。經過無數次的實驗結果,此轉速量測系統的 • 顯示電路均顯示石英振盪器的輸出脈波數為N2=5000,如圖7 所示之轉速量測實驗系統 • 外觀圖。 • 若依據(2)式,當f1=4 kHz、f2=4 MHz 和N1=5 時,可算出N2 為: • 此計算數據與實驗結果完全吻合,驗證圖7 之轉速量測系統是正確可行的,而且經 • 過無數次的實驗均顯示石英振盪器的輸出脈波數為5000,更確定此轉速量測方法之高精 • 確度。 • 若假設編碼器旋轉一圈產生的脈波數K=1000,則由式(3)可求得馬達轉速為:
本轉速量測系統,石英振盪器產生的脈波頻率為4 MHz,在編碼器的5 個輸出脈波 • 寬量測時間內(N1=5),假設量測到石英振盪器的輸出脈波數分別為N2=100、N2=1000 • 和N2=10000 三種情況時,依據(4)式可得最大轉速量測誤差分別為1%、 0.1% 和0.01%, • 此結果並經無數次的實驗證明上述之正確性。由上述結果可知最大轉速量測誤差與量測 • 到石英振盪器輸出脈波數N2 之關係呈線性降低,也就是量測到石英振盪器的輸出脈波 • 數每增加十倍,則最大轉速量測誤差降低十倍,如圖8 所示。 • 另外假設編碼器的輸出脈波頻率分別為f1=1000、f1=10000 和f1=100000 三種情況 • 時,依據(5)式可得最大轉速量測誤差約分別為0.005%、0.05%和0.5%,此結果並經多 • 次的實驗證明上述之正確性。由上述結果可知最大轉速量測誤差與編碼器輸出脈波頻率 • f1 之關係呈線性昇高,也就是編碼器的輸出脈波頻率每增加十倍,則最大轉速量測誤差 • 昇高十倍,如圖9 所示。 • 在要求最大轉速量測誤差介於0.0005%至0.5%的範圍,由圖9 可得編碼器輸出脈波 • 頻率f1 介於於102 Hz 至105 Hz 的範圍,再根據(2)式馬達轉速R=60 f1 / K=60 f1 / 1000, • 可算出馬達轉速量測範圍自6 rpm 至6000 rpm。也就是利用本量測系統,量測自6 rpm • 至6000 rpm 之轉速範圍,其轉速量測誤差不會超過0.5%。這個結果說明本方法只需利 • 用低脈波數且價格便宜的編碼器,和一個便宜、體積小、易操作的CPLD,就可完成高 • 精確度之馬達轉速量測系統。
六、結論 • 由實驗結果可知,本文提出的馬達轉速量測具備下列優點:(1)由圖9 可知在馬達轉 • 速越低時,量測誤差越小,即使在高馬達轉速時,其量測誤差仍小,例如量測自6 rpm • 至6000 rpm 之馬達轉速,其最大轉速量測誤差介於0.0005%至0.5%的範圍。與傳統方 • 式比較,本系統具有更高精確度之優點。(2)量測時間很短,例如本系統的N1=5,假設 • 編碼器旋轉一圈產生的脈波數K=1000,則只要馬達旋轉5/1000 圈,本系統即可量出馬 • 達轉速。與傳統方式比較,本系統具有量測時間較短的優點。(3)此方法以外加的高頻晶 • 體振盪電路提供一個穩定頻率做為基頻,因此不受馬達控制器的最高輸入頻率的影響。 • 例如當使用三菱的FX2N 系列的PLC 做為馬達控制器時,可以不使用PLC 的2 相2 編 • 碼高速計數器當轉速量測,因此量測不會受到最高頻率30 kHz 的限制。(4) 本系統與傳 • 統方式相較具有容易擴充及低成本的優點。
七、參考文獻 • [1]. T. Fukuda and T. Shibata (1992), “Theory and Application of Neural Networks for • Industrial Control Systems,” IEEE Trans. on Industrial Electronics, 39(6):3-20. • [2]. B. K. Bose (1986), Power Electronics and AC Drivers, Englewood Cliffs, NJ: • Prentice-Hall. • [3]. A. Pagel, A. S. Meyer, and C. F. Landy (2000), “The Design of Equalizer Windings for • Lap-Wound DC Machines,” IEEE Trans. on Industry Applications, 37(2): 1000-1011. • [4]. C. D. Angelo, G. Bossio, J. Solsona, G. O. Garcia, and M. I. Valla (2006), “Mechanical • Sensorless Speed Control of Permanent-Magnet AC motors Driving an Unknown Load,” • IEEE Trans. on Industrial Electronics, 53(2):406-414. • [5]. H. J. Kim, H. D. Lee, and S. K. Sul (2001), “A New PWM Strategy for Common-Mode • Voltage Reduction in Neutral-Point-Clamped Inverter-Fed AC Motor Drives,” IEEE • Trans. on Industry Applications, 37(6):1840-1845. • [6]. G. K. Singh, D. K. P. Singh, K. Nam, and S. K. Lim (2005), “A Simple Indirect • Field-Oriented Control Scheme for Multiconverter-Fed Induction Motor,” IEEE Trans. • on Industrial Electronics, 52(6):1653-1659. • [7]. A. Consoli, G. Scarcella, and A. Testa (2004), “Slip-Frequency Detection for Indirect • Field-Oriented Control Drives,” IEEE Trans. on Industry Applications, 40(1):194-201.
[8]. K. A. Corzine (2000), “A Hysteresis Current-Regulated Control for Multi-Level Drives,” • IEEE Trans. on Energy Conversion, 15(2):169-175. • [9]. B. Mwinyiwiwa, Z. Wolanski, and O. Boon-Teck (1998), “Microprocessor Implemented • SPWM for Multiconverters with Phase-Shifted Triangle Carriers,” IEEE Trans. on • Industry Applications, 34(3):487-494. • [10].C. T. Lin, C. W. Hung, and C. W. Liu (2008), “Position Sensorless Control for • Four-Switch Three-Phase Brushless DC Motor Drives,” IEEE Trans. on Power • Electronics, 23(1):438-444. • [11].T. S. Kwon, M. H. Shin, and D. S. Hyun (2005), “Speed Sensorless Stator Flux-Oriented • Control of Induction Motor in the Field Weakening Region Using Luenberger Observer,” • IEEE Trans. on Power Electronics, 20(4):864-869. • [12].T. Senjyu, T. Shingaki and K. Utezato (2001), “Sensorless Vector Control of • Synchronous Reluctance Motors with Disturbance Torque Observer,” IEEE Trans. on • Industrial Electronics, 48(2):402-407. • [13].T. C. Chen and T. T. Sheu (2001), “Model Reference Robust Speed Control for • Induction-Motor Drive with Time Delay Based on Neural Network”, IEEE Trans. on • Systems, Man and Cybernetics-part A: Systems and Humans, 31(6):746-753. • [14].S. H. Choi, J. S. Ko, I. D. Kim, J. S. Park and S. C. Hong (2005), “Precise Position • Control Using a PMSM with a Disturbance Observer Containing a System Parameter • Compensator,” Proc. Electric Power Applications, 152(6):1573-1577.
[15].Z. Su and K. Khorasani (2001), “A Neural-Network-Based Controller for a Single-LinkFlexible Manipulator Using the Inverse Dynamics Approach,” IEEE Trans. IndustrialElectronics, 48(6):1074-1086.[16].T. C. Chen and T. T. Sheu (2002), “Model Reference Neural Network Controller forInduction Motor Speed Control”, IEEE Trans. on Energy Conversion, 17(2): 157-163.[17].S. K. Mondal, J. O. P. Pinto and B. K. Bose (2002), “A Neural-Network-BasedSpace-Vector PWM Controller for a Three-Level Voltage-Fed Inverter Induction MotorDrive,” IEEE Trans. on Industry Applications, 38(3):660-669.