Download
1 / 21
210 likes | 399 Views
A kinematic cost. Reza Shadmehr. Subject’s performance. Minimum jerk motion. Point to point movements generally exhibit similar characteristics: hand trajectory is along a straight line hand speed follows a smooth, bell shaped time course

E N D
A kinematic cost Reza Shadmehr
Subject’s performance Minimum jerk motion • Point to point movements generally exhibit similar characteristics: • hand trajectory is along a straight line • hand speed follows a smooth, bell shaped time course • hand speed is typically symmetric about the midpoint of the movement. Flash and Hogan, J Neurosci 1985
Straight hand paths often translate into curved trajectories for the joints of the arm. This computation is performed using inverse kinematics transformation. Average hand path for normal subjects with eyes open. Subjects rested their hand on a board at chest level and were shown a small cylinder to reach to at a target location. Sergio & Scott, Exp Brain Res 1998
Movements tend to be straight, even in congenitally blind individuals In the blindfold condition, the experimenter takes the hand of the subject to the start and target positions and asks them to make a few practice movements between the two points. Same procedure is used for the blind individuals. Blind individuals tend to show even straighter movements that those with vision. Sergio & Scott, Exp Brain Res 1998
We adapt our movements so that they appear straight to us Subject sits in front of a digitizing tablet and holds a mouse. He is viewing an image that corresponds to the position of his finger. He is given a target to move to. During the movement, the computer either displays his actual hand position, or an altered version of it. If he is shown his actual hand position, the hand moves in a fairly straight line. Here, the perturbation is a hemi-sinusoid in the negative x-direction. The perturbation makes it so that a straight hand path will become slightly curved to the left. The alteration is so small that the subjects are not consciously aware of it. Despite this, subjects change their hand motion (after practice) so that it appears to them that the hand is moving in a nearly straight path. no perturbation Post-perturbation after practice Wolpert et al., Exp Brain Res 1995
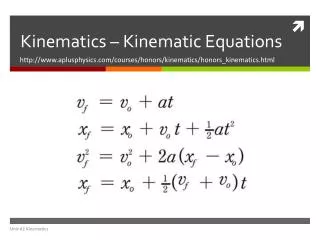
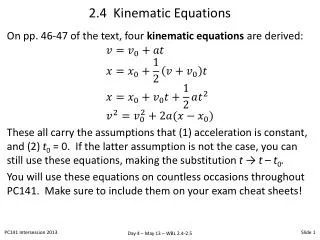
Computing a maximally smooth trajectory for point to point movements Smoothness can be quantified as the mean squared magnitude of jerk. Jerk is the rate of change of acceleration with respect to time, hence the third time derivative of position.
Objective: find the function x(t) that minimizes the cost Approach: calculus of variations
Initial conditions This is called the minimum jerk trajectory in one dimension
Homework • 1. Find the trajectory x(t) that minimizes the cost function: • find the general solution using calculus of variation • solve the differential equation using the following initial conditions • The x(t) that you found is called a minimum acceleration trajectory. • 2. Plot x(t) and for • 3. Compute the value of the cost function for the • x(t) that you found in question 1. • 4. Compute the value of the cost function for the • x(t) that you found in question 1.
General Form of the Minimum Jerk Trajectory The limb is at position x=xi. We wish to move to x=xf in t=a seconds.
Minimizing higher order derivatives As the order of the derivative in the cost function increases, x(t) approaches a step function, and its first derivative (speed) becomes narrower and taller. This means that the ratio of peak speed to average speed gets larger. Ratio=r. (n=2, r =1.5), (n =3, r =1.875), (n =4, r =2.186) For simple planar movements, humans exhibit motion that most resembles minimum jerk (n =3). r for these sorts of movements in humans is ~1.75.
Example: Making a point to point movement with a two-joint arm 1. Eyes foveate the hand. From angle of each eye and position of the neck muscles, the brain estimate current hand position: xi desired change in hand position 2. Eyes foveate the target. From angle of each eye and position of the neck muscles, the brain estimate the target position: xf 3. A decision is made on how much time the movement should take: a seconds. A desired tarjectory for the hand in terms of a change in its current position is calculated: desired change in hand position with respect to its initial position desired hand position with respect to the shoulder
Points are 10 msec apart t (sec)
Translating the desired trajectory into joint rotations Goal: Forward kinematics: Jacobian: Mapping:
m/s m Translating the desired trajectory into joint rotations With the inverse Jacobian, we can map desired hand velocities into joint velocities. Velocities are change in position, so if we know the initial hand position, we can use this map to calculate what rotations the joints need to do to bring the hand to the desired target. rad/s
Planning: errors in mapping xd(t) onto qd(t) The display (projector) shows the finger position to be either 17 cm to the left or to the right of its actual position. A target is shown, and subject is asked to make a movement. Visual feedback is provided throughout the movement. Displayed finger position Displayed target Actual arm position Example: displayed position = actual position - 17 cm Goodbody & Wolpert, Exp Brain Res 1999
Dx Dxd Dq Dqd perceived angular position of the arm If there were no visual feedback during the movement, one would expect that the hand would move to the right of the target. target perceived hand position actual hand position
gain If visual feedback was available during the movement, we would see that our hand is not moving to the target, and so we would incorporate this error into the desired trajectory as the error became available. This is an example of feedback control. In the following simulation, we have assumed that errors in position are added to the desired hand trajectory (with a moderate gain). motor commands arm dynamics + perceived error in arm position perceived position of the arm visual distortion + _ actual arm position perceived arm position
Displacement of the visual feedback is to the left Goodbody & Wolpert, Exp Brain Res 1999