Download
1 / 25
250 likes | 438 Views
Dynamische analyse. 1. Inleiding. 2. De beweging van de MOBAT. 3. Het dynamisch model. 3.1 Vissim. 3.1.1 De opbouw. 3.1.2 Het model. 3.1.3 De uitkomsten. 3.2 Working Model 2D. 3.2.1 De opbouw. 3.2.2 Het model. 3.2.3 De uitkomsten. 4. Conclusie. 1. Inleiding.

E N D
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
De beweging van de MOBAT - De MOBAT roteert om de pads - De achterkant van de MOBAT komt omhoog (jump) - De achterwielen van de grond (bij zware lading)
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
Het dynamisch model Doel - Simulatie van de MOBAT - Inzicht krijgen in mogelijke oplossingen - Het effect van veranderingen voorspellen Twee rekenprogramma’s - Vissim - Working Model 2D
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
Vissim - De berekeningen handmatig ingevoeren m.b.v. blokschema’s - Intergratiemethode van Runge-Kutta • Voordelen • Goed inzicht in de theorie • Grote flexibiliteit • Nadelen • Tijdrovend • Slechte grafische voorstelling
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
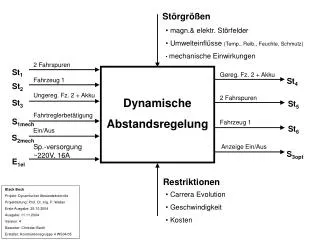
Momentenstelling Hoekversnelling MOBAT / Traagheid Achteras Schot Vooras x Arm x Arm x Arm Krachtenevenwicht achteras Schotkracht Krachtenevenwicht vooras Dempkracht Dempkracht Veerkracht Schotkracht Veerkracht De opbouw
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
Working Model 2D - Schets in Working Model - Eigenschappen toekennen - Intergratiemethode van Runge-Kutta • Voordelen • Goede grafische voorstelling • Makkelijk en snel • Nadelen • Theorie achter het programma is niet bekend • Mogelijkheden zijn beperkt - Working Model controleVissim
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
- Schotkracht - Veer-, dempsysteem vast aan de aarde - Lichaam vastgezet aan de aarde door een rotatiepunt - Veer-, dempsysteem met een massa De opbouw
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie
Conclusie - De eerste piek van het Vissim-model komt overeen met de meetgegevens - De modellen hebben inzicht gegeven in de beweging van de MOBAT - De modellen zijn een goede simulatie van de werkelijkheid - De modellen kunnen gebruikt worden om het gedrag van de MOBAT te voorspellen - Verder in de tijd wijkt de grafiek meer af
1. Inleiding 2. De beweging van de MOBAT 3. Het dynamisch model 3.1 Vissim 3.1.1 De opbouw 3.1.2 Het model 3.1.3 De uitkomsten 3.2 Working Model 2D 3.2.1 De opbouw 3.2.2 Het model 3.2.3 De uitkomsten 4. Conclusie