Download

1 / 17
200 likes | 449 Views
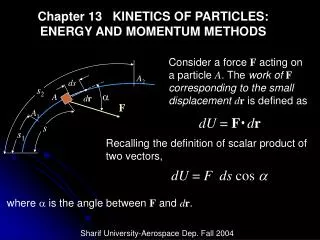
KINETICS OF PARTICLES: ENERGY AND MOMENTUM METHODS. Consider a force F acting on a particle A . The work of F corresponding to the small displacement d r is defined as. A 2. ds. s 2. a. A. d r. F. A 1. dU = F d r. s. s 1.

E N D
KINETICS OF PARTICLES: ENERGY AND MOMENTUM METHODS Consider a force F acting on a particle A. The work of Fcorresponding to the small displacement dr is defined as A2 ds s2 a A dr F A1 dU = Fdr s s1 Recalling the definition of scalar product of two vectors, dU = Fds cosa where a is the angle between F and dr.
dU = Fdr = Fds cosa A2 ds s2 a The work of F during a finite displacement from A1 to A2 , denoted by U1 2 , is obtained A dr F A1 s s1 by integrating along the path described by the particle. A2 ٍ U1 2 = Fdr A1 For a force defined by its rectangular components, we write A2 ٍ U1 2 = (Fxdx + Fydy + Fzdz) A1
A2 The work of the weight W of a body as its center of gravity moves from an elevation y1to y2 is obtained by setting Fx = Fz = 0 and Fy = - W. W dy y2 A A1 y y1 y2 ٍ U1 2 = - Wdy = Wy1 - Wy2 y1 The work is negative when the elevation increases, and positive when the elevation decreases.
A O x 2 U = - k x dx A x 1 1 2 1 x 1 1 1 = kx - kx 1 2 2 2 A x 2 2 The work of the force F exerted by a spring on a body A during a finite displacement of the body from A1 (x = x1) to A2 (x = x2) is obtained by writing spring undeformed B dU = -Fdx = -kx dx ٍ B F 2 2 A x The work is positive when the spring is returning to its undeformed position. . B
A2 The work of the gravitational force F exerted by a particle of mass M located at O on a particle of mass m as the latter moves from A1 to A2 is obtained from A’ dr m r2 A r2 r ٍ GMm r2 dr F U1 2 = dq r1 A1 -F GMm r2 GMm r1 r1 q M = - O
The kinetic energy of a particle of mass m moving with a velocity v is defined as the scalar quantity 1 2 T = mv2 From Newton’s second law the principle of work and energy is derived. This principle states that the kinetic energy of a particle atA2can be obtained by adding to its kinetic energy at A1 the work done during the displacement from A1 to A2 by the force F exerted on the particle: T1 + U1 2 = T2
The power developed by a machine is defined as the time rate at which work is done: dU dt Power = = F v where F is the force exerted on the particle and v is the velocity of the particle. The mechanical efficiency, denoted by h, is expressed as power output power input h =
When the work of a force F is independent of the path followed, the force F is said to be a conservative force, and its work is equal to minus the change in the potential energy V associated with F : U1 2 = V1 - V2 The potential energy associated with each force considered earlier is Vg = Wy Force of gravity (weight): GMm r Vg = - Gravitational force: 1 2 Ve = kx2 Elastic force exerted by a spring:
U1 2 = V1 - V2 This relationship between work and potential energy, when combined with the relationship between work and kinetic energy (T1 + U1 2 = T2) results in T1 + V1 = T2 + V1 This is the principle of conservation of energy, which states that when a particle moves under the action of conservative forces, the sum of its kinetic and potential energies remains constant. The application of this principle facilitates the solution of problems involving only conservative forces.
1 2 1 2 v When a particle moves under a central force F, its angular momentum about the center of force O remains constant. If the central force F is also conservative, the principles of conservation of angular momentum and conservation of energy can be used jointly to analyze the motion of the particle. For the case of oblique launching, we have f P v0 r f0 r0 O P0 (HO)0 = HO : r0mv0 sin f0 = rmv sin f GMm r GMm r0 T0 + V0 = T + V : mv2 - = mv2 - 0 where m is the mass of the vehicle and M is the mass of the earth.
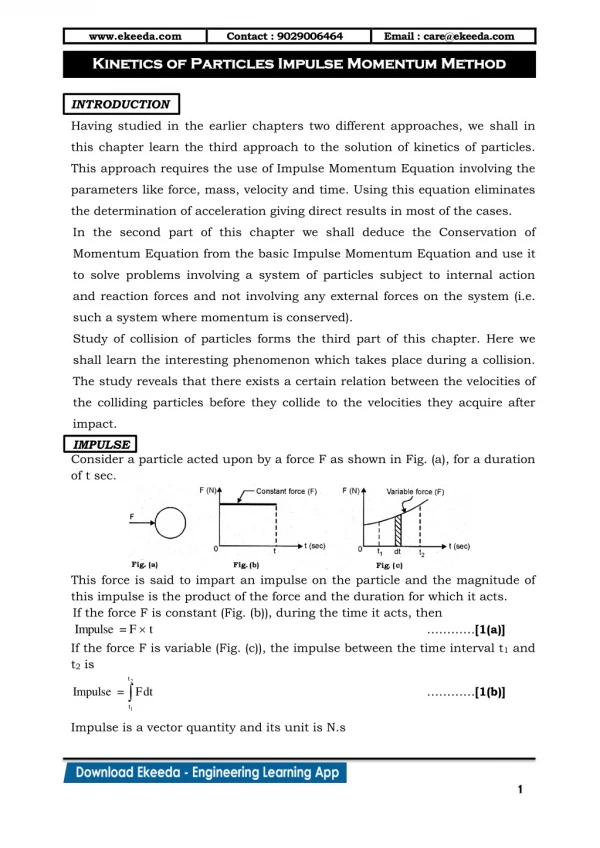
The linear momentum of a particle is defined as the product mv of the mass m of the particle and its velocity v. From Newton’s second law, F = ma, we derive the relation t2 ٍ mv1 + Fdt = mv2 t1 where mv1 and mv2 represent the momentum of the particle at a time t1 and a time t2 , respectively, and where the integral defines the linear impulse of the force F during the corresponding time interval. Therefore, mv1 + Imp1 2 = mv2 which expresses the principle of impulse and momentum for a particle.
When the particle considered is subjected to several forces, the sum of the impulses of these forces should be used; mv1 + SImp1 2 = mv2 Since vector quantities are involved, it is necessary to consider their x and y components separately. The method of impulse and momentum is effective in the study of impulsive motion of a particle, when very large forces, called impulsive forces, are applied for a very short interval of timeDt, since this method involves impulses FDt of the forces, rather than the forces themselves. Neglecting the impulse of any nonimpulsive force, we write mv1 + SFDt= mv2
In the case of the impulsive motion of several particles, we write Smv1 + SFDt= Smv2 where the second term involves only impulsive, external forces. In the particular case when the sum of the impulses of the external forces is zero, the equation above reduces to Smv1 = Smv2 that is, the total momentum of the particles is conserved.
Line of Impact vB B A Before Impact vA v’B B A v’A After Impact In the case of direct central impact, two colliding bodies A and B move along the line of impact with velocities vA and vB , respectively. Two equations can be used to determine their velocities v’A and v’B after the impact. The first represents the conservation of the total momentum of the two bodies, mAvA + mBvB = mAv’A + mBv’B
Line of Impact vB B A Before Impact vA v’B B A v’A After Impact mAvA + mBvB = mAv’A + mBv’B The second equation relates the relative velocities of the two bodies before and after impact, v’B - v’A = e (vA - vB ) The constant e is known as the coefficient of restitution; its value lies between 0 and 1 and depends on the material involved. When e = 0, the impact is termed perfectly plastic; when e = 1 , the impact is termed perfectly elastic.
Line of Impact In the case of oblique central impact, the velocities of the two colliding bodies before and after impact are resolved into n components along the line of impact and t components along the common tangent to the surfaces in contact. In the t direction, n t vB B A Before Impact (vA)t = (v’A)t (vB)t = (v’B)t vA v’B while in the n direction n mA (vA)n + mB (vB)n = mA (v’A)n + mB (v’B)n t v’A B vB (v’B)n - (v’A)n = e [(vA)n - (vB)n] A After Impact vA
Line of Impact n (vA)t = (v’A)t (vB)t = (v’B)t t mA (vA)n + mB (vB)n = mA (v’A)n + mB (v’B)n vB B A Before Impact (v’B)n - (v’A)n = e [(vA)n - (vB)n] vA v’B n Although this method was developed for bodies moving freely before and after impact, it could be extended to the case when one or both of the colliding bodies is constrained in its motion. t v’A B vB A After Impact vA