Download
1 / 1
50 likes | 266 Views
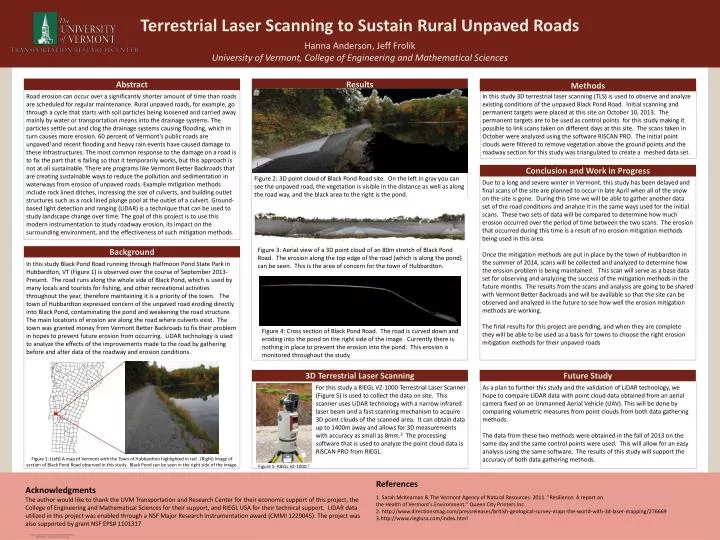
Terrestrial Laser Scanning to Sustain Rural Unpaved Roads . Hanna Anderson, Jeff Frolik University of Vermont, College of Engineering and Mathematical Sciences . Abstract. Results . Methods . Methods .

E N D
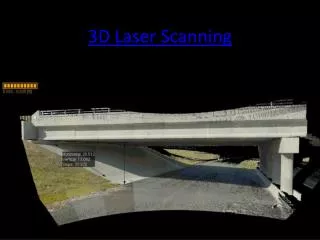
Terrestrial Laser Scanning to Sustain Rural Unpaved Roads Hanna Anderson, Jeff Frolik University of Vermont, College of Engineering and Mathematical Sciences Abstract Results Methods Methods Road erosion can occur over a significantly shorter amount of time than roads are scheduled for regular maintenance. Rural unpaved roads, for example, go through a cycle that starts with soil particles being loosened and carried away mainly by water or transportation means into the drainage systems. The particles settle out and clog the drainage systems causing flooding, which in turn causes more erosion. 60 percent of Vermont’s public roads are unpaved1and recent flooding and heavy rain events have caused damage to these infrastructures. The most common response to the damage on a road is to fix the part that is failing so that it temporarily works, but this approach is not at all sustainable. There are programs like Vermont Better Backroads that are creating sustainable ways to reduce the pollution and sedimentation in waterways from erosion of unpaved roads. Example mitigation methods include rock lined ditches, increasing the size of culverts, and building outlet structures such as a rock lined plunge pool at the outlet of a culvert. Ground-based light detection and ranging (LiDAR) is a technique that can be used to study landscape change over time. The goal of this project is to use this modern instrumentation to study roadway erosion, its impact on the surrounding environment, and the effectiveness of such mitigation methods. In this study 3D terrestrial laser scanning (TLS) is used to observe and analyze existing conditions of the unpaved Black Pond Road. Initial scanning and permanent targets were placed at this site on October 10, 2013. The permanent targets are to be used as control points for this study making it possible to link scans taken on different days at this site. The scans taken in October were analyzed using the software RiSCAN PRO. The initial point clouds were filtered to remove vegetation above the ground points and the roadway section for this study was triangulated to create a meshed data set. Conclusion and Work in Progress Figure 2: 3D point cloud of Black Pond Road site. On the left in gray you can see the unpaved road, the vegetation is visible in the distance as well as along the road way, and the black area to the right is the pond. Due to a long and severe winter in Vermont, this study has been delayed and final scans of the site are planned to occur in late April when all of the snow on the site is gone. During this time we will be able to gather another data set of the road conditions and analyze it in the same ways used for the initial scans. These two sets of data will be compared to determine how much erosion occurred over the period of time between the two scans. The erosion that occurred during this time is a result of no erosion mitigation methods being used in this area. Once the mitigation methods are put in place by the town of Hubbardton in the summer of 2014, scans will be collected and analyzed to determine how the erosion problem is being maintained. This scan will serve as a base data set for observing and analyzing the success of the mitigation methods in the future months. The results from the scans and analysis are going to be shared with Vermont Better Backroads and will be available so that the site can be observed and analyzed in the future to see how well the erosion mitigation methods are working. The final results for this project are pending, and when they are complete they will be able to be used as a basis for towns to choose the right erosion mitigation methods for their unpaved roads Figure 3: Aerial view of a 3D point cloud of an 80m stretch of Black Pond Road. The erosion along the top edge of the road (which is along the pond) can be seen. This is the area of concern for the town of Hubbardton. Background In this study Black Pond Road running through Halfmoon Pond State Park in Hubbardton, VT (Figure 1) is observed over the course of September 2013-Present. The road runs along the whole side of Black Pond, which is used by many locals and tourists for fishing, and other recreational activities throughout the year, therefore maintaining it is a priority of the town. The town of Hubbardton expressed concern of the unpaved road eroding directly into Black Pond, contaminating the pond and weakening the road structure. The main locations of erosion are along the road where culverts exist. The town was granted money from Vermont Better Backroads to fix their problem in hopes to prevent future erosion from occurring. LiDAR technology is used to analyze the effects of the improvements made to the road by gathering before and after data of the roadway and erosion conditions. Figure 4: Cross section of Black Pond Road. The road is curved down and eroding into the pond on the right side of the image. Currently there is nothing in place to prevent the erosion into the pond. This erosion is monitored throughout the study. 3D Terrestrial Laser Scanning Future Study For this study a RIEGL VZ-1000 Terrestrial Laser Scanner (Figure 5) is used to collect the data on site. This scanner uses LiDAR technology with a narrow infrared laser beam and a fast scanning mechanism to acquire 3D point clouds of the scanned area. It can obtain data up to 1400m away and allows for 3D measurements with accuracy as small as 8mm.3 The processing software that is used to analyze the point cloud data is RiSCAN PRO from RIEGL. As a plan to further this study and the validation of LiDAR technology, we hope to compare LIDAR data with point cloud data obtained from an aerial camera fixed on an Unmanned Aerial Vehicle (UAV). This will be done by comparing volumetric measures from point clouds from both data gathering methods. The data from these two methods were obtained in the fall of 2013 on the same day and the same control points were used. This will allow for an easy analysis using the same software. The results of this study will support the accuracy of both data gathering methods. Figure 1: (Left) A map of Vermont with the Town of Hubbardton highlighted in red. (Right) Image of section of Black Pond Road observed in this study. Black Pond can be seen in the right side of the image. Figure 5: RIEGL VZ-1000.2 References Acknowledgments The author would like to thank the UVM Transportation and Research Center for their economic support of this project, the College of Engineering and Mathematical Sciences for their support, and RIEGL USA for their technical support. LIDAR data utilized in this project was enabled through a NSF Major Research Instrumentation award (CMMI 1229045). The project was also supported by grant NSF EPS# 1101317 1. Sarah McKearnan & The Vermont Agency of Natural Resources. 2011. "Resilience: A report on the Health of Vermont's Environment." Queen City Printers Inc. 2. http://www.directionsmag.com/pressreleases/british-geological-survey-maps-the-world-with-3d-laser-mapping/276669 3.http://www.rieglusa.com/index.html