Download
1 / 15
150 likes | 374 Views
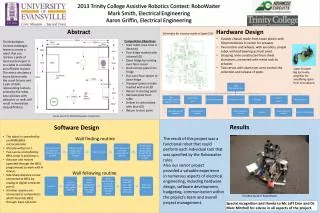
2014 Trinity College RoboWaiter Competition. Mark Smith, Electrical Engineering A aron Griffin, Electrical Engineering. Competition takes place on April 5-6, 2014 at Trinity College in Hartford, Connecticut. Special Thanks to Dr. Marc Mitchell and Jeff Cron. Overview.

E N D
2014 Trinity College RoboWaiter Competition Mark Smith, Electrical Engineering Aaron Griffin, Electrical Engineering Competition takes place on April 5-6, 2014 at Trinity College in Hartford, Connecticut Special Thanks to Dr. Marc Mitchell and Jeff Cron
Overview • What is the Robowaiter competition? • What tasks were to be performed? • How did we accomplish these tasks? • How was the circuitry powered and organized? • Did we stay inside our projected budget? • Results of this project?
What is the RoboWaiter competition? • Designing an autonomous robot that can find and carry a plate of food from a refrigerator to a table. • Connecticut Council on Developmental Disabilities • Meant to simulate real kitchen. • New methods of assisted living. http://www.trincoll.edu/events/robot/Rules/Rules2014/TCFFHRCRules2014-Final2013-09-22HTML/RWAdvanced12.png
What tasks were to be performed? Required Tasks • Detect starting sounds frequency • Locate and open fridge • Activate sensor before and after collecting plate • Grab correct plate and transport to table • Place plate and return to starting position • Detect starting tone • Retrieve plate and take to sink • Return to starting location http://www.trincoll.edu/events/robot/Rules/Rules2014/TCFFHRCRules2014-Final2013-09-22HTML/TCFFHRC%20Rules%202014%20-%20Final%202013-09-22.html
Rules and Regulations Immediate Disqualification if • Robot physically touches anything, except plate or the fridge shelf • Plate touches floor • The robot extracts the wrong container • Fridge door is prematurely opened • Fridge door is not closed Placement Brackets • Number of completed runs determines placement http://www.trincoll.edu/events/robot/Rules/Rules2014/TCFFHRCRules2014-Final2013-09-22HTML/TCFFHRC%20Rules%202014%20-%20Final%202013-09-22.html
How did we accomplish each task? Frequency Range Lower Shelf: 3.8kHz ± 10% Upper Shelf: 2.5kHz ± 10% Frequency Detection • Super Snooper Big Ear Audio amplifier • LM567 Tone Decoders • Voltage comparator • 8951 timer • Back up threshold detection • Chose to use ATMEL 8951 microcontroller http://www.transeltech.com/index.php?main_page=product_info&products_id=2
How did we accomplish each task? Robot’s Propulsion • Devantech MD25 Dual 12V 2.8A H-Bridge DC Motor Driver • Built in Encoder working with microcontroller to calculate location with respect to start • Serial Communication • Propulsion from two wheels with front pivot • Custom Chassis made from Lexan Plastic http://www.robotshop.com/drive-system-12-volt.html
How did we accomplish each task? • Navigating arena • Three Sharp Distance sensors cascaded with comparator circuits • One Sharp Distance feeding directly into 8951 • Uses microcontrollers analog to digital converter • Two photoresistors to find red and blue beacons • Photoresistors have physical light filters to pass correct light spectrum • One phototransistor with bandwidth that only passes Infrared light
How did we accomplish each task? • Raising to shelf height • Actuator base made with 3D printer • 4” actuator to raise or lower arms • Move to height of shelves • H-bridge used to control actuator movement • Photoresistor with plastic film to pass only red light attached to arm • Photoresistor used to find the two shelves • Grasping Arms • Use of simple connecting materials to create arms • Erector, Etc. http://www.engrcs.com/components/MotorDriverQuad_SN754410.pdf http://b.pololu-files.com/picture/0J3072.200.jpg?dfc0535cb05cd163a4b77d2ae9c697a9
How did we accomplish each task? Grabbing and holding plate • Two servo motors to open and close grip • Hands used to pick up plate made from aluminum bent to the correct shape • One hand bent into dustpan design • Second hand bent into broom design to grab plate but push away unwanted objects • Push button on bottom of arms to lower onto shelf http://www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXDEL9
How was the circuitry powered? • Used rechargeable 12V 3000mAh battery for all circuitry except audio amplifier • Audio amplifier ran off separate 9V battery • Lm323k voltage regulator used for its high power dissipation • Heat sync used to dissipate heat from regulator • All power connected through main power switch http://www.hobbyking.com/hobbyking/store/__8851__zippy_flightmax_3000mah_3s1p_20c.html http://www.st.com/web/en/resource/technical/document/datasheet/CD00000466.pdf
How was the circuitry organized? • Schematic of circuit designed in EAGLE CAD • Printed circuit board(PCB) created from schematic • LED placed throughout circuit for debugging • PCB ordered through 4PCB.com
Project Results • Created functional robot that could complete each task of competition • Project provided valuable experience in numerous aspects of electrical engineering, including: • Hardware design • Software development • Budgeting • Communication • Project management
Questions? http://www.trincoll.edu/events/robot/RoboWaiter/robowaiter2.JPG