Download
1 / 25
250 likes | 385 Views
SCM 330 Ocean Discovery through Technology. Area F GE. Theory. Sensor. Application. Sensors - Biological. Traditional Approach Nets Bottles Sensors Fluorometers Optical Scattering (particle size) Flow Cytometers Acoustics VPR Light Sheets Molecular Tagging. Tagging Pelagics.

E N D
SCM 330 Ocean Discovery through Technology Area F GE
Theory Sensor Application Sensors - Biological Traditional Approach Nets Bottles Sensors Fluorometers Optical Scattering (particle size) Flow Cytometers Acoustics VPR Light Sheets Molecular Tagging
Tagging Pelagics Fishes Turtles Mammals Behavior Mating Feeding Conservation Organism Habitat
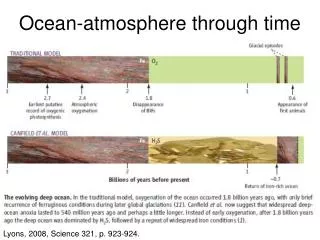
The digital tag consists of • a hydrophone (acoustic) channel with a 12-bit analog-to-digital converter, and a programmable gain filter. The typical acoustic sampling rates are 16kHz or 32 kHz. • additional sensors, sampled at 12 bits and roughly 23 Hz (when audio sampling is 16 kHz), including • a pressure sensor to measure depth, 0-2000m, resolution of 0.5m. • a thermistor both for water temperature and to correct the pressure sensor readings. • 3-axis MEMS-based accelerometers to measure pitch and roll. • 3-axis solid-state magnetometers to measure heading. • a salt water switch to detect surfacings and to trigger the initial recording of data. • depending on the tag version, from 400 megabytes to 1.6 gigabytes of flash memory to record up to 20 hours of acoustic and sensor data when sampling at 16 kHz. • a nichrome wire release mechanism, which can be triggered to corrode away slowly and release the tag from the animal after a set amount of time. When the nichrome wire has corroded away, a small valve is opened, flooding the suction cups and allowing it to float to the surface. • a VHF radio beacon to enable tracking and focal observations of the whale when it surfaces, and to find the tag for recovery when the suction cups release from the animal. • a real-time clock to give an accurate timebase and to trigger events such as the nichrome wire release. • an infrared serial port for menu-based user interface and for data transfer. • a low-power digital signal processor capable of 100 million instructions per second, enabling complex compression and detection routines. • a lithium ion polymer rechargable battery pack, 2 Watt-Hours. Power consumption when recording is about 150 mW.
Example Data Reading: 21215 Date : 20.02.97 05:55:37 LC : 0 IQ : 45 Lat1 : 51.254N Lon1 : 50.136W Nb mes : 004 Nb mes>-120dB : 002 Best level : -116 dB Pass duration : 282s NOPC : 3 Calcul freq : 401 649279.4 Hz Altitude : 0 m 146, 144, 93, 188 09, 172, 15, 18 05, 56, 57, 121
Key to the data header - the first two lines of the reading: 21215 =satellite tag identification numberDate: 20.02.97 = 20 Feb. 199705:55:37 = Time in Greenwich Mean Time, GMT (hour:minute:second)LC & IQ reflect transmission quality LC just stands for Location Class. Location Classes of 0 and up are the best (derived from 4 or more messages)- a Class 0 is good to within between 1,000 and 5,000 meters. Classes 1,2,3- get consistently more accurate. The letter classes are given no estimate of error, but the A's are better than the B's etc. It appears that some of the letter class locations are pretty good (i.e. several fixes over a short period are quite similar), but then others vary wildly- especially the longitude. Lat1 and Long1 indicate position/fix The data in the middle three lines of the reading: This information refers to the type and quality of the transmission from the tag to the satellite and are beyond the scope of most educational programs. Nb mes : 004 Nb mes>-120dB : 002 Best level : -116 dB Pass duration : 282s NOPC : 3 Calcul freq : 401 649279.4 Hz Altitude : 0 m Key to the series of numbers at the end of the reading: This series of numbers is the dive data. There should be a series of 4, 8 or 12 numbers. All of the numbers in the series should add up to even multiples of 256. If they don't, then the message was incomplete or garbled somehow. Therefore, the first thing to do is add up all of the numbers and divide the sum by 256. If you get a number with no remainder the message is good. The first number in the series is an identifier, that tells you what type of message you are getting. If the number is even, the message is a status message. Status messages should be a series of twelve numbers, all of which tell something about the tag. (If the number is odd go to histograms, below.)