Download
1 / 56
570 likes | 747 Views
A Shortest-Path-Based Topology Control Algorithm in Wireless Multihop Networks. ACM SIGCOMM Computer Communication Review Volume 37, Number 5, October 2007. Presented by: C.W. Fan-Chiang. Author. Yao Shen, He is currently a Ph.D.

E N D
A Shortest-Path-Based Topology ControlAlgorithm in Wireless Multihop Networks ACM SIGCOMM Computer Communication Review Volume 37, Number 5, October 2007 Presented by: C.W. Fan-Chiang
Author • Yao Shen,He is currently a Ph.D. candidate of the Department of Computer Science and Engineering at Shanghai Jiaotong University, China. His research interests include topology control, power management and network modeling in wireless multihop networks.
Author • Yunze Cai Currently, she is a faculty member of the Department of Automation, Shanghai Jiaotong University, China. Her research interests include robust control for delay systems, robust filter design and wavelet denoising.
Author • Xiaoming Xu, received the Ph.D. degree inCT &CE from Shanghai Jiaotong University, China, in 1987. Now, he is a professor in the Department of Automation, SJ University, China. Since 2004 he has worked as a president in University of Shanghai for Science and Technology, China. His research interests include predictive control, process control and robust control theory and application.
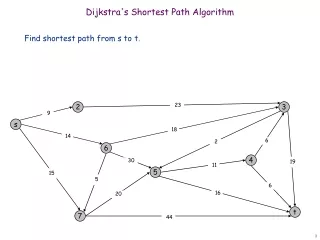
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM-LSP • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
INTRODUCTION(1/3) • Topology control algorithms are used to reduce node power consumption and extend network lifetime while maintaining network connectivity. • Topology control algorithms should select the appropriate logical neighbors to ensure that the minimal energy paths in the original network preserved in the final topology.
INTRODUCTION(2/3) 109 LMST-140.25 LMST+ 128.25
INTRODUCTION(3/3) • Major contribution is that LSP is a framework which can be instantiated with any energy model, while ensuring that the minimal energy path between any two nodes is preserved in the final topology.
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM-LSP • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
Reference-MECN • Author implies that the region is circle • Each mobile node has a single-chip GPS receiver on board.
Reference-MECN • First Phase • Each node first executes local search to find the enclosure graph. • Second Phase • Each node runs the distributed Bellman-Ford shortest path algorithm upon the enclosure graph using power consumption as the cost metric.
Reference-MECN • Strongly connected • Self-reconfigured • However, for nodes with high mobility the algorithm leads to the communication cost sharply rise. • In some cases, the complexity can be O(N3)
Reference-CBTC • Cone based topology control algorithm • Since CBTC is a Direction-based algorithm it needs nodes to equip some omniantenna
Reference-OPT-CBTC • OP1- The shrink-back operation • OP2- Asymmetric edge removal • OP3- Pairwise edge removal
Reference-OPT-CBTC • There is a tradeoff between CBTC(5π/6) and CBTC(2π/3) • If reconfiguration happens often, there are advantages to using CBCT(5π/6). • Finally, we showed using CBTC(α) with α = 2π/3 allows an additional optimization.
Reference-SMECN • Assumption • Each node has a GPS receiverchip on board so it knows its own locationand the antenna is omnidirectional. • Authors are implicitly assuming that even if there are obstacles or the antenna is not omnidirectional, a node knows the terrain and the antenna characteristics well enough to compute F(u,p)
Reference-SMECN P0 : initial transmission power A : the set of all the nodes that u has found so far in the search process. M : consists of the new nodes found in the current iteration. η : the direct-transmission region of induced by the currently known nodes A in the region F(u,p).
Reference-SMECN • Both algorithms, MECN and SMECN, implicitly assume that a long link consumes more power than a short link, which is unpractical in heterogeneous networks. • SMECN is only applicable in homogeneous networks.(Best applicable to non-mobile sensor networks.) • More overhead introduced • Self-reconfiguring
Reference-LMST • Propagation channel is symmetric and obstacle-free. • It can construct a all-bidirectional-link topology. • Retain a small degree(6) of nodes in the topology can reduce conflict
Reference-LMST • 1) Information Collection • 2) Topology Construction (G0) • Use Prim’s algorithm O(e log v) or other • 3)Determination of Transmission Power • 4) Construction of Topology With Only Bidirectional Edges • to enforce all the unidirectional links in G0 to become bidirectional – LMST+ • to delete all the unidirectional links in G0 – LMST–
Reference-LMST • LMST+ and LMST- • LMST has a small average node degree and a small average radius • Its performance is better than MECN and CBTC in • total amount of data delivered(in bytes), • the energy efficiency(in Bytes/Joule), • end-to-end delay.
Reference • LSP ⊆ SMECN ⊆ MECN • LMST ⊆ MST • In some occasion, LMST ⊆ MECN
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM-LSP • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
PROPOSED ALGORITHM-LSP Defining terms • We model the topology of a wireless network with each node using its maximal transmission power as an undirected graph G = (V,E) in the two dimensional plane, • where V = {v1, v2, ..., vn} is the set of nodes in the network and E is the set of bidirectional links. • Eachnode vi may have its own transmissionpower pit which canbe adjusted by itself • Bidirectional link (vi, vj) єE implies that both vi and vj are covered by each other.
PROPOSED ALGORITHM-LSP • NSip = {vk|(vi, vk) єE(G) or (vk, vi) єE(G)}. (1)The logical neighbor set NSilis a subset of NSip , i.e. NSil⊆NSip • Each bidirectional link is assigned a weight which can be expressed by w(i, j). • The computation of w(i, j) usually relates only to vi and vj , at most to their neighbors.
PROPOSED ALGORITHM-LSP1) Link weight calculation • Each node in this step locally collects the information needed in the weight calculations for all links associated with it, and calculates link weights. • We suggest that it should have the same value for both directions of a link. • some energymodel the two endpoints of a link (vi, vj) mayderive differentweights (unidirectional link weight, denoted as )
PROPOSED ALGORITHM-LSP2) Link Weight Information Exchange • Each node viexchanges the unidirectional link weight information derived in the first step with its 1-hop neighbors by broadcasting using its maximal transmission power pimax. • vi knows all the weights calculated at the nodes in the set of {vi} ∪ NSip . Therefore, for any two nodes vx, vyє {vi} ∪NSip, if there is a bidirectional link (vx, vy), vi can derive w(x, y) according to
PROPOSED ALGORITHM-LSP2) Link Weight Information Exchange • Node vi may receive from node vj while vj is out of its range. In this case, link (vj , vi) is not considered by vi.
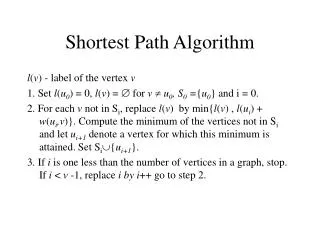
PROPOSED ALGORITHM-LSP3) Local Topology Construction • Each node vi computes the local shortest path connecting it to every node vjєNsip according to the derived link weights. • The Dijkstra’s algorithm can be employed if there is no negative link weight, and the time complexity varies from • If negative link weights exist, then the Bellman-Ford algorithm can be used and the time complexity is
PROPOSED ALGORITHM-LSP3) Local Topology Construction • Denote the local shortest path connecting vi to vjєNSip as • The logical neighbor set NSil can be represented by • Note that the path is bidirectional since every link on the path is bidirectional. However, the path pathj,i is not the reverse of pathi,jsince NSip ≠ NSjp
PROPOSED ALGORITHM-LSP3) Local Topology Construction • Another point, not every neighbor close to vi is its logical neighbor and not every logical neighbor of vi is close to it since the short link is not always power efficient according to some realistic energy model. • Through the construction of the local shortest paths, each node can derive a local route table which is described as
PROPOSED ALGORITHM-LSP 4) Transmission Power Adjusting • After each node vi derives its logical neighbor set NSil, it computes the minimal transmission power piadj required to cover all of its logical neighbors, and then adjusts its transmission power to be piadj .
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM -LSP • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
THEORETICAL ANALYSIS • For any two nodes vi, vjєV (G), node vi is said to beconnected to node vj (denoted as vi , vj) if there exists atleast one bidirectional path (vp0 = vi, vp1 , ...vpn−1 , vpn = vj)in G0 where vpxєV (G), x = 1, 2, ..., n − 1. It follows thatvi⇔vk if vi⇔vj and vj⇔ vk.
THEORETICAL ANALYSIS • Lemma 1. For any two nodes vi, vjєV(G), if vjєNSipthen vi⇔vj . • Theorem 1. G0 preserves the connectivity of G, i.e., G0 is connected if G is connected.
THEORETICAL ANALYSIS • Lemma 2. For any node viєV(G), NSil,g⊆ NSil . • Lemma 3. Given any node vpx on the global shortest path pathi,jg satisfying x≥ 1, then vpxєNSpx−1l.
THEORETICAL ANALYSIS • Theorem 2. For any two connected nodes vi, vjєV(G), the global shortest path pathi,jg exists in G0. • Theorem 3. For the two topologies G0 and Gs(derived under SMECN) of the same homogeneous network, each node in G0 has a transmission power not larger than that of the corresponding node in Gs.
THEORETICAL ANALYSIS • Theorem 3 implies that G0 is a subgraph of Gs. Meanwhile, it has been proved in [2]MECN that Gs is a subgraph of the topology constructed by MECN. • Therefore, LSP is actually more power-efficient than both SMECN and MECN in homogeneous networks.
AGENDA • INTRODUCTION • RELATED WORK • REFERENCES • MECN, SMECN • CBTC • LMST • PROPOSED ALGORITHM -LSP • THEORETICAL ANALYSIS • PERFORMANCE EVALUATION • CONCLUSIONS
PERFORMANCE EVALUATION • First assume a homogeneous network energy model, and compare the performance of LSP with SMECN, LMST, OPT-CBTC(2π/3) and MaxPower. • Then assume a heterogeneous network energy model and compare LSP with LMST, OPT-CBTC(2π/3) and MaxPower.
PERFORMANCE EVALUATION • Performance metrics used in the study include the number of logical neighbors, the adjusted transmission range and the path power which is consumed by all the nodes on the minimal energy paths when transmitting. • real path power and minimal path power
Simulation Results in Homogeneous Networks • Assume that a transmission between node vi and vj takes power pit(j) = td(i, j)αand a reception at the receiver takes power c • Link weight is defined as w(i, j) = td(i, j) α + c • Assume t = 5 × 10−7and α = 4. Nodes are randomly distributed in a 1000 × 1000 m2region. Each node has an omnidirectional antenna. The common maximal transmission range is 250 m, and the common receiver power is 20 mW.
Simulation Results in Homogeneous Networks • For a network of 200 nodes, the topologies derived using the maximal transmission power, LMST− , OPT-CBTC, SMECN and LSP are shown in Fig3
Simulation Results in Homogeneous Networks • Next we vary the number of nodes in the region from 50 to 250. Each data point is the average of 50 simulation runs.
Simulation Results in Heterogeneous Networks • We assume that each node in the networks operates in one of the following states: Idle, Transmit and Receive. Denote the powers consumed at vi in three states as piidle, pitx and pirx respectively.
Simulation Results in Heterogeneous Networks • The pitx can be broken down into two parts, the power consumed by RF amplifier piamp and the one by non-amplifier pielec. • Denote the power efficiency of RF amplifier asηi, then piamp = pit/ηi , where pit is the transmission power. Thus the power consumed at the sender vi is pitx = pielec + pit/ ηi. • The minimal transmission power pit(j) for supporting a link (vi, vj) is assumed to be pit(j) = pjs × |vi, vj |α where pjs is the receiver sensitivity of vj .
Simulation Results in Heterogeneous Networks • We call the node within the transmission range of the sender an auditor. Denote the power consumed at the auditor vk as pka, then the power consumed at all auditors in a transmission from vi is given by where Ri(d) denotes the transmission range of the sender vi with the transmission radius d.