Download
1 / 44
440 likes | 746 Views
Sequential Machine Theory. Prof. K. J. Hintz Department of Electrical and Computer Engineering Lecture 1 http://cpe.gmu.edu/~khintz. Adaptation to this class and additional comments by Marek Perkowski. Why Sequential Machine Theory (SMT)?. Sequential Machine Theory – SMT

E N D
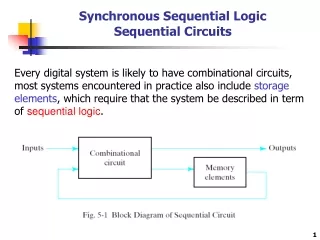
Sequential Machine Theory Prof. K. J. Hintz Department of Electrical and Computer Engineering Lecture 1 http://cpe.gmu.edu/~khintz Adaptation to this class and additional comments by Marek Perkowski
Why Sequential Machine Theory (SMT)? • Sequential Machine Theory – SMT • Some Things Cannot be Parallelized • Theory Leads to New Ways of Doing Things, has also practical applications in software and hardware (compiler design, controllers design, etc.) • Understand Fundamental FSM Limits • Minimize FSM Complexity and Size • Find the “Essence” of a Machine, • what does it mean that there is a machine for certain task?
Why Sequential Machine Theory? • Discuss FSM properties that are unencumbered by Implementation Issues: • Software • Hardware • FPGA/ASIC/Memory, etc. • Technology is Changing Rapidly, the core of the theory remains forever. • Theory is a Framework within which to Understand and Integrate Practical Considerations
Hardware/Software • There Is an Equivalence Relation Between Hardware and Software • Anything that can be done in one can be done in the other…perhaps faster/slower • System design now done in hardware description languages (VHDL, Verilog, higher) without regard for realization method • Hardware/software/split decision deferred until later stage in design
Hardware/Software • Hardware/Software equivalence extends to formal languages • Different classes of computational machines are related to different classes of formal languages • Finite State Machines (FSM) can be equivalently represented by one class of languages
Formal Languages • Unambiguous • Can Be Finite or Infinite • Give some simple examples • Can Be Rule-based or Enumerated • Various Classes With Different Properties
Finite State Machines • FSMs are Equivalent to One Class of Languages • Prototypical Sequence Controller • Generator • acceptor • controller • Many Processes Have Temporal Dependencies and Cannot Be Parallelized, • the need some form of state machine. • FSM Costs • Hardware: More States More Hardware • Time: More States, Slower Operation • Technology dependent: how many CPLD chips?
Goal of this set of lectures • Develop understanding of Hardware/Software/Language Equivalence • Understand Properties of FSM • Develop Ability to Convert FSM Specification Into Set-theoretic Formulation • Develop Ability to Partition Large Machine Into Greatest Number of Smallest Machines • This reduction is unique
Machine/Mathematics Hierarchy • AI Theory Intelligent Machines • Computer Theory Computer Design • Automata Theory Finite State Machine • Boolean Algebra Combinational Logic
Combinational Logic • Feedforward • Output Is Only a Function of Input • No Feedback • No memory • No temporal dependency • Two-Valued Function Minimization Techniques • Well-known Minimization Techniques • Multi-valued Function Minimization • Well-known Heuristics
Finite State Machine • Feedback • Behavior Depends Both on Present State and Present Input • State Minimization • Well-known • With Guaranteed Minimum • Realization Minimization • Unsolved problem of Digital Design • Technology related, combinational design related
Computer Design: Turing Machines • Defined by Turing Computability • Can compute anything that is “computable” • Some things are not computable • Assumed Infinite Memory • State Dependent Behavior • Elements: • Control Unit is specified and implemented as FSM • Tape infinite • Head • Head movements • Show example of a very simple Turing machine now: x--> x+1
Intelligent Machines • Some machines display an ability to learn • How a machine can learn? • Some problems are possibly not computable • What problems? • Why not computable? • Something must be infinite?
Automata, aka FSM • Concepts of Machines: • Mechanical • Counters, adders • Computer programs • Political • Towns, highways, social groups, parties, etc • Biological • Tissues, cells, genetic, neural, societies • Abstract mathematical • Functions, relations, graphs You should be able to use FSM concepts in other areas like robotics
FSM - Abstract mathematical concept of many types of behavior • Discrete • Continuous system can bediscretized to any degree of resolution • Finite State: • finite alphabets for inputs, outputs and states. • Input/Output • Some cause, some result
Set Theoretic Formulation of Finite State Machine • S: Finite set of possible states • I: Finite set of possible inputs • O: Finite set of possible outputs • :Rule defining state change • :Rule determining outputs
Types of FSMs • Moore FSM • Output is a function of state only • Mealy FSM • Output is a function of both the present state and the present input Discuss timing differences, show examples and diagrams, discuss fast signaling and PLD realization
Types of FSMs • Finite State Acceptors, Language Recognizers • Start in a single, specified state • End in particular state(s) • Pushdown Automata • Not an FSM • Assumed infinite stack with access only to topmost element
Computer • Turing Machine • Assumed infinite read/write tape • FSM controls read/write/tape motion • Definition of computable function • Universal Turing Machinereads FSM behavior from tape
Review of Set Theory • Element: “a”, a single object with no special property • Set: “A”, a collection of elements, i.e., • Enumerated Set: • Finite Set:
Sets • Infinite set • Set of sets
Subsets • All elements of B are elements of A and there may be one or more elements of A that is not an element of B A3 Larry, Curly, Moe A6 integers A7
Proper Subset • All elements of B are elements of A and there is at least oneelement of Athat is not an element of B
Set Equality • Set A is equal to set B
Sets • Null Set • A set with no elements, • Every set is a subset of itself • Every set contains the null set
Operations on Sets • Intersection • Union Logical AND Logical OR
Operations on Sets • Set Difference • Cartesian Product, Direct Product
Special Sets • Powerset: set of all subsets of A *no braces around the null set since the symbol represents the set
Special Sets • Disjoint sets:A and B are disjoint if • Cover: We know set covering problem from 572. It was defined as a matrix problem
Properties of Operations on Sets • Commutative, Abelian • Associative • Distributive Left hand distributive
Partition of a Set • Properties • pi are called “pi-blocks” or “-blocks” of PI
Relations Between Sets • If A and B are sets, then the relation from A to B, is a subset of the Cartesian product of A and B, i.e., • R-related:
Domain of a Relation Domain of R R B a A b
Range of a Relation Range of R R b A a B
Inverse Relation, R-1 R-1 B a A b
PartialFunction, Mapping • A single-valued relation such that R a b b’ a’ * A B * can be many to one
Partial Function • Also called the Image of a under R • Only one element of B for each element of A • Single-valued • Can be a many-to-one mapping
Function • A partial function with • A b corresponds to each a, but only one b for each a • Possibly many-to-one: multiple a’s could map to the same b
Function Example 1 2 3 4 u v w • Unique, one image for each element of A and no • more • Defined for each element of A, so a function, • not partial • Not one-to-one since 2 elements of A map to v
Surjective (called also Onto) relations • Range of the relation is B • At least one a is related to each b • Does not imply • single-valued • one-to-one R B Not mapped A a 1234 s1s2s3
Injective, or One-to-One relations • “A relation between 2 sets such that pairs can be removed, one member from each set, until both sets have been simultaneously exhausted.”
Bijective • A function which is both Injective and Surjective is Bijective. • Also called “one-to-one” and “onto” • A bijective function has an inverse, R-1, and it is unique
B A b B aa’ A Function Examples • Monotonically increasing if injective • Not one-to-one, but single-valued
b b’ B b’’ a A Function Examples • Multivalued, but one-to-one There are no two a’s which would have the same b, so it is one-to-one