Download
1 / 20
200 likes | 412 Views
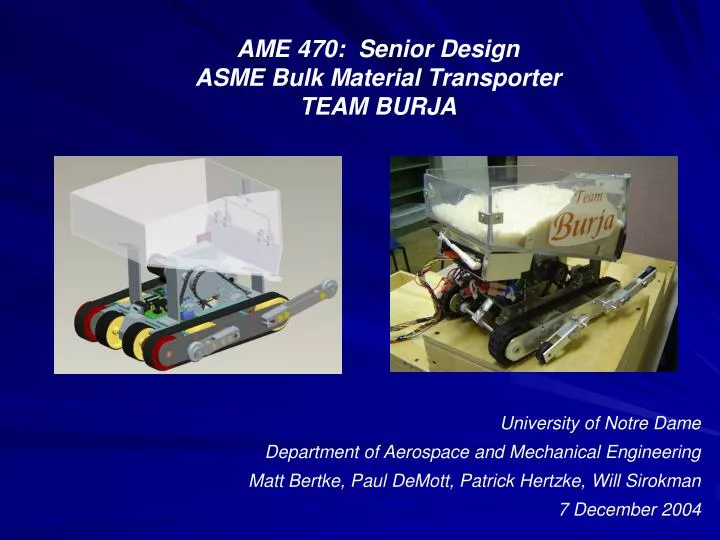
AME 470: Senior Design ASME Bulk Material Transporter TEAM BURJA. University of Notre Dame Department of Aerospace and Mechanical Engineering Matt Bertke, Paul DeMott, Patrick Hertzke, Will Sirokman 7 December 2004. Executive Summary. TEAM BURJA.

E N D
AME 470: Senior Design ASME Bulk Material Transporter TEAM BURJA University of Notre Dame Department of Aerospace and Mechanical Engineering Matt Bertke, Paul DeMott, Patrick Hertzke, Will Sirokman 7 December 2004
Executive Summary TEAM BURJA ASME Student Design Competition: Bulk Material Transporter Critical Constraints and Requirements Early Concept Development Critical Design Issues Strengths and Weaknesses Failure Modes Future Development
12 inches Starting Area Receiving Box ASME Problem Description Objective TEAM BURJA • Design a remote-controlled vehicle to navigate the stair course. • Transport a granular payload from the starting area and deliver it to the receiving box. • Transport as much grain as possible in a 10-minute time period.
ASME Problem Description Critical Requirements and Constraints TEAM BURJA • Vehicle dimensions must not exceed 25 cm x 25 cm x 30 cm. (ASME) • Energy sources limited to eight 1.5 V batteries or ten 1.2 V batteries, in addition to two 9 V batteries. (ASME) • Remotely controlled via radio or umbilical. (ASME) • $500 budget. (ND) • 14 – week concept development and manufacturing period. (ND)
5 lbs of rice per trip At least 2 trips in 10 minutes Mini-Max Microcontroller Early Concept Development Primary Design Objectives TEAM BURJA Primary Design Objectives: • High Payload • Efficient Operation • “Intelligent” Electronics • Allows variable motor-speed control using potentiometers. • Ability to automate stair navigation tasks using position sensor(s). • Provides a flexible software platform that can be modified for a number of different tasks.
Early Concept Development Preliminary Concepts TEAM BURJA Swing Arm Concept STRENGTHS WEAKNESSES • Simple design and operation. • High payload capacity. • Sensitive to changes • in center of mass. • High torque required for swing arm. Hinged Tread Concept STRENGTHS WEAKNESSES • Fluid motion up stairs. • High traction. • Complex mechanical design. • Low grain capacity.
Early Concept Development Prototype Testing and Final Design TEAM BURJA • A LEGO prototype of the single swing arm design to test functionality. • Design flaw discovered: Both lifting actions of swing arm require different locations of center of mass. • Solution: New design with two sets of swing arms. • Final Design utilizes short front swing arms and long rear swing arms. Swing arms are geared together 180° out of phase. Revised LEGO Prototype/Final Climbing Process 1) Align Vehicle 2) Front Arms Down 3) Rear Arms Down 4) Drive forward/Repeat
Final Concept and Prototype Videos of Prototype Operation TEAM BURJA
Critical Design Issues Swing Arm Geometry TEAM BURJA Front Swing Arm: Design Considerations • Applies a moment about the rear wheels – mechanical advantage maximized if front arm axle is farther forward. • Axle placement limited by reverse rotation of the front swing arm. • Shorter arm requires less motor torque. Design Choice • Axle located at center of vehicle wheelbase. • 3.3” arm length. Rear Swing Arm: Design Considerations • Applies a moment about the front wheels – mechanical advantage maximized if front arm axle is farther back. • Shorter arm requires less motor torque, but arm must extend at least 4” below bottom of treads due to stair height. Design Choice • Axle located 1.25” forward of rear wheel axle. • 5.25” arm length.
Center of Mass Chassis Rear Swing Arm Critical Design Issues Swing Arm Torque TEAM BURJA • Static and dynamic force analyses conducted to predict necessary arm torque. • Longer rear swing arm requires more torque than front swing arm. Pivot Point “O” • Based on a 10 lb combined vehicle and payload weight, static lifting torque was estimated at > 2.4 Nm. • A 4.0 Nm gear motor was incorporated into final prototype due to availability and to increase payload capacity.
Critical Design Issues Center of Mass TEAM BURJA Center of Mass: • Acceptable domain for the vehicle center of mass is dictated by swing arm geometry. • Must lie between the two swing arm axles (3” apart). • Cannot lie behind the rear tread wheel when the vehicle is inclined. • RESULT: Final prototype is balanced such that it can operate successfully with a full payload or completely empty.
Hinged Door Support Counter-weighted Lever 20 ° • Front Drive Motors • From Trade Study, Required Torque = .15 Nm • From Testing Prototype, Max Speed = 50 - 60 RPM Solenoid Drive motors Chosen Motor Hsiang Neng – 38GM - 60 Part # 253500CR Critical Design Issues Other Important Issues TEAM BURJA • Rice Container Design: • Unique geometry of container is defined by ASME constraint. • Rice Door Mechanism: • A counter-weighted lever mechanism was implemented to gain mechanical advantage due to a solenoid that was weaker than expected. • Rice Container Design: • Unique geometry of container is defined by ASME constraint. • Rice Door Mechanism: • A counter-weighted lever mechanism was implemented to gain mechanical advantage due to a solenoid that was weaker than expected. Rice container in white fits just within the ASME constraint size (gray box) Vehicle successfully delivering a full payload of rice (approximately 7lbs)
H-Bridge Mini-Max Board (PIC 16F877a Processor) Critical Design Issues Electronics TEAM BURJA • PHILOSOPHY • • Use a microprocessor and automation to make operation simple and precise. • APPLICATION • Microprocessor adds precision • Pulse width modulation (PWM) and • H-bridges allow variable tread speed. • Angular encoder allows precise, • computer controlled arm movement. • Automation • Automated algorithm is initiated by user. • User can interrupt computer or override with manual control.
STRUCTURE OF MAIN() [Initialization]; While (true) { [Check for algorithm button press]; [Check for change in encoder signal]; [Check current potentiometer input]; [Check for manual arm control]; [Drive the motors]; [Drive the swing arms]; } Critical Design Issues Electronics TEAM BURJA • PROGRAMMING OF MINI-MAX PROCESSOR • DESIGNED FOR FUNCTIONALITY • Functions built and tested individually. • Functions can be easily added/removed. • CODE STRUCTURE • Main loop comprises seven function calls • All input evaluated before change in output. • High speed evaluation ensures that input is not missed. (Rechecks inputs every • cycle (at about 2000 Hz) • Code allows simultaneous inputs and conflicting commands.
5V Mini-MaxMicroprocessor 4.7k 9V Battery Manual swing-arm fwd Manual swing-arm rev Ascend Algorithm Descend Algorithm Motor Brake Potentiometer 1 Potentiometer 2 Reset 4.7k 4.7k 4.7k 4.7k 10k 4.7k 10k Rotary Encoder 12V Battery Drive Motor L 2A Fuse H-Bridge 1 Regulator • CIRCUIT LAYOUT • Power Input. Two 9V and one 12V battery. • •Umbilical Inputs. Pull down (4.7k resistors). • Rotary Encoder Input. • Outputs. Signal to H-Bridges. • Motors. Driven by H-Bridges. • Solenoid. Separate circuit. 2A Fuse Drive MotorR H-Bridge 2 Swing Arm 2A Fuse H-Bridge 3 9V Battery Solenoid
Final Concept and Prototype Strengths of Concept and Prototype TEAM BURJA • OVERALL • Robust design • High capacity – 8 lb per trip • Climbs quickly and efficiently - 3 minute round trip • Automated and programmable • TREADS • Tread teeth provide lever effect • Independent, variable speed control • SWING ARM MECHANISM • Accurate, computer controlled angular rotation • Applies strong, consistent force • Aligns vehicle as it lifts • DUMPING MECHANISM • Reliable latched mechanism • Efficient: gravity assisted fall minimizes energy usage
Final Concept and Prototype Weaknesses of Concept and Prototype TEAM BURJA • WEAKNESSES OF FINAL CONCEPT • Complexity of design – 288 parts • Large number of manufactured parts – 20 different parts • Heavy – 7 lb • High Cost – over $500 • WEAKNESSES OF PROTOTYPE • Unknown electrical problems: interference, shorts, over heating?? - Result: Automation disabled to simplify electronics • No variable speed reverse • Inefficient and error prone turning procedure • Poor traction of flat surface of stairs
Final Concept and Prototype Likely Failure Modes TEAM BURJA • RICE DUMP FAILURE • Dumps without button press • Human bumps latch (unresolved) • Fails to dump on button press • LOSS OF CONTROL • Hardware failure • Electronic interference/other issue(unresolved) • Code failure • Maximum H-Bridge frequency exceeded • (may be unresolved – reverse PWM disabled)
Final Concept and Prototype Future Development TEAM BURJA • FUTURE ELECTRONICS DEVELOPMENT • The use of the microprocessor provides potential for further refinement • Shield electronics from heat, interference, impact • Incorporate reverse PWM • Incorporate automation climbing algorithm • Refine turning procedure • FUTURE MECHANICAL MODIFICATIONS • Replace shafts with precision ground shafting • Re-fabricate and realign tread assemblies • Improve swing arm clamping mechanism • Add safety latch to rice bin • Modify rice bin to ensure complete release of rice • Seal chassis and electronics from rice
TEAM BURJA Questions?