Download
1 / 50
520 likes | 949 Views
KCPA SAMPLE Hydraulic SYSTEMS. Tom Korder kordertv@uiuc.edu. Roméo et Juliette RAMP. Two – One –, rated up to 5 GPM One – One – . Roméo et Juliette RAMP. Ramp cylinders. Roméo et Juliette RAMP. Ramp cylinders. Roméo et Juliette RAMP.

E N D
KCPA SAMPLE Hydraulic SYSTEMS Tom Korder kordertv@uiuc.edu
Roméo et Juliette RAMP • Two – • One –, rated up to 5 GPM • One – One –
Roméo et Juliette RAMP Ramp cylinders
Roméo et Juliette RAMP Ramp cylinders
Roméo et Juliette RAMP Hydraulics viewed from under ramp in trap room cylinders Flow divider
Roméo et Juliette SLIPSTAGE • Two – • One –, rated up to 5 GPM • One – One –
Roméo et Juliette SLIPSTAGE Slipstage in “out” position
Roméo et Juliette SLIPSTAGE Cable drum Hydraulic motor
Shop-Built Hydraulic Trainer • AC Power Unit (500 psi, 1-2 gpm) • Tie-rod and industrial cylinders • Low speed/high torque motor • Rotary Actuator • Industrial and Mobile valves • different actuations and centers • Flow, pressure, etc. valves • sandwich and in-line style • Pressure gauges and flow meter • Hoses with couplers, adapters
Closed Loop vs. Open Loop pressure line pressure line Return line Return line pressure line pressure line Return line inlet exhaust
DESIGNING A SYSTEM • Determine System Parameters • Perform System Calculations • Choose System Components
System Parameters • What type of movement? (Linear or Rotary) • actuator type • How far does it travel? • Stroke, degree of rotation • How heavy is the object ? • total weight of all materials • What speed? • How fast of move? safe travel speed ? • How fast to get to full speed? , rpm • Other needed components?
B. System Calculations • FORCE / TORQUE • lbs of force • in lbs of torque • SPEED / FLOW • time for stroke • time for rotation
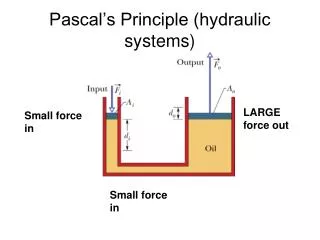
AREA–PRESSURE / force • Amount of force is determined by pressure pump can deliver • measured in psi – lbs per square inch 2000 lbs of force 6000 lbs of force 1000 psi 3000 psi 2” actuator 2” actuator
F = P X A force = pressure x area Area = d2 x .7854 lb = psi x sq in given a stated force needed start with assumed area pick a cylinder bore start with assumed system pressure as low as possible for safety experiment with numbers until you find right combination calculate AREA–PRESSURE /force load cylinder
examples AREA–PRESSURE /force • Force=Pressure x Area Force (lb.) = pressure (lb sq in) x area (sq in) 2” bore x ?? psisystem pressure • 1570 lb=500 psix3.14 (22x.7854) sq. in. • 4710 lb=1500 psix3.14 (22x.7854) sq. in. • 9420 lb=3000 psix3.14 (22x.7854) sq. in.
Multiplication of Force F / A = P 242 x .7854 = 452 sq. in. 220 lb. / 452 sq. in. = .48 psi 1442 x .7854 = 16286 sq. in. .48 psi x 16286 sq. in. = 7817 lb. of force
FLOW / Speed • rate of flow determined by pump delivery • flow determines speed of devices • measured in GPM - gallons per minute 5 seconds 10 seconds 5 gpm 2.5 gpm 2” actuator 2” actuator
calculate –FLOW / Speed To Find Needed GPM • Flow=Area x stroke length x .26 time for stroke • gal./min. = sq. in. x in. x .26 sec. • Flow (gal./min.) = (area (sq in) x stroke length (in) x .26) / time for stroke (sec)
examples –FLOW / Speed • Flow=Area x stroke length x .26 time for stroke Flow (gal./min.) = (area (sq in) x stroke length (in) x .26) / time for stroke (sec) 2” bore x 36” stroke cylinder ; 30 seconds, 15 seconds, 10 seconds • .97 gpm=3.14 (22x.7854) sq. in. x 36 in. x .26 30 sec. • 1.95 gpm=3.14 sq. in. x 36 in. x .26 15 sec. • 2.93 gpm=3.14 sq. in. x 36 in. x .26 10 sec.
Motor Shaft Speed • Speed of the motor output shaft. Speed =___flow x 231_____ motor displacement • shaft speed in RPM • flow in GPM • displacement in cubic inches per revolution • 231 = cubic inches in a gallon
C. System Components DCV(Directional Control Valve) Other control devices (pressure,flow, etc) Power unit (pump) Actuator (cylinder)
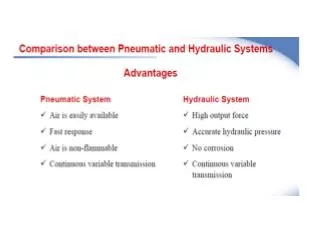
MOBILE vs. INDUSTRIAL • Industrial • closer tolerances, more expensive, valves are modular • Mobile • also known as agricultural, rugged/basic construction, more plumbing/hoses, less expensive • Suggestion • Mobile actuators, Industrial valves
POWER UNIT • Preassembled vs. Shop assembled • System Flow • GPM – gallons per minute • System Pressure • psi – pounds per square inch • Voltage • 110vac or 220vac • 1 or 3 • Reservoir size • gallons
DCV directional control valve • Actuation method • manual, electrical, or fluid • Rating • flow and pressure • Center style • closed, open, float, or tandem • Style of construction • mobile or industrial
CENTER CONFIGURATIONS • Closed or Blocked • when operating 2 or more branch circuits from one pump, where more than one must operate at one time • Float • cylinder is free to "float", piston can be pulled or pushed by an external force, sometimes used for Hydraulic motors • Open • motor" spool , minimizes circuit shock when controlling a motor, not recommended for cylinders • Tandem • popular for low power systems, provides free flow path for "pump unloading", simple/economical way to unload, holds cylinder against drift
ACTUATOR • Action Needed • Linear, Rotary limited motion, Rotary continuous motion • Amount of action needed • stroke length, degree of rotation, speed • Force in both directions or only one • Force / Speed • Bore/Displacement, Pressure, GPM rating, Port sizes • Mounting Method
Mobile (Ag) style cylinders Tie-Rod Cylinder Welded Cylinders
OTHER CONTROL DEVICES • Pressure Control (force) • Flow Control (speed) • Additional controls • Safety Devices • Additional filtering • Electrics/Electronics • Counterbalancing • Flow dividing
Recommended Systems – ADD-ONS • Combine two systems • Power Unit • Second power unit • AdditionalValves • Industrial-solenoid proportional w/ electronic card • Actuators • Additional cylinders • Rotary actuator • Accessories • Flow divider • More hoses
SAFETY RULES • Understand the basic principle and be familiar with components of the system. • The pressure in the system should never exceed the rated pressure of the lowest rated component. • Be certain all interfaces to the fluid power system are adequate in strength. • Never work on system under pressure. • Test all circuitry with low pressure before the load is attached. • Use only the pressure required to achieve the effect. an obstruction, overload, or added friction will stall the system until you fixed the problem • Use common sense!!!
Jack Miller (following this slide are new slides that address these topics, these were not included in original workshop presentation) • Pump does not produce pressure. • Always use a Counterbalance valve if you have a load over the cylinder. • Be certain all interfaces to the fluid power system are adequate in strength. • …………………………………….
PRESSURE load • pressure is created whenever the flow of a fluid is resisted • A. load on actuator • B. resistance or orifice in the piping • pump DOES NOT create pressure • it has the ability to push against a certain pressure A B actuator
COUNTERBALANCE VALVE • counterbalance valve is an improved pilot operated check valve • the opening pressure of a pilot operated check valve depends on the pressure (applied by the load) behind the valve • the opening pressure of a counterbalance valve depends on the spring pressure behind the valve.
Counterbalance Valve • dynamic performance of balance valve is many times better than the performance of a pilot operated check valve • balance valve is applied as a 'brake valve' in order to get a positive control on a hydraulic cylinder or motor with a negative load • small crane systems • elevator • scissor lifts out pilot in pilot
Counterbalance valve Left side of DCV is activated, cylinder will make its 'OUT-stroke‘, oil flows through integrated check valve. To lower cylinder, the right side of DCV is activated. From that moment on pressure is built up at the rod side of the cylinder. This pressure opens the balance valve & the oil at the bottom side of the cylinder flows through the balance valve & DCV back to reservoir. out pilot in pilot
Counterbalance valve To lower cylinder, the right side of DCV is activated. From that moment on pressure is built up at the rod side of the cylinder. This pressure opens the balance valve The oil at the bottom side of the cylinder flows through the balance valve & DCV back to reservoir As the load helps lowering the cylinder, the cylinder might go down faster than the oil is applied to the rod side of the cylinder (the cylinder isn't under control at that moment). However, the pressure at the rod side of the cylinder and therefore the pilot pressure on the balance valve will decrease and the spring moves the balance valve to the direction 'close' as long as it finds a new 'balance'. .
“An Introduction to Hydraulics”USITT- Minneapolis 2003 Notes available at http://www.nwmissouri.edu/%7Epimmel/usitt/tech_prod/TECH_PROD_INDEX.HTM Contact me at: kordertv@uiuc.edu