Download
1 / 36
370 likes | 767 Views
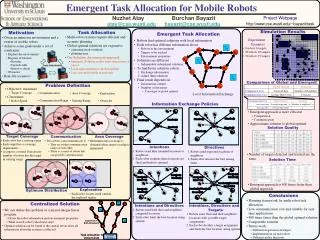
Emergent Task Allocation for Mobile Robots Nuzhet Atay Doctoral Student Seminar Advisor : Burchan Bayazit Motivation Given an unknown environment and a swarm of mobile robots Achieve some goals under a set of constraints Explore the environment Regions of interest Dynamic Unpredictable

E N D
Emergent Task Allocation for Mobile Robots Nuzhet Atay Doctoral Student Seminar Advisor : Burchan Bayazit
Motivation • Given an unknown environment and a swarm of mobile robots • Achieve some goals under a set of constraints • Explore the environment • Regions of interest • Dynamic • Unpredictable • Spread or shrink • Obstacles • Real-life scenarios Nuzhet Atay
Robotic Systems • Heterogeneous robots with limited • Speed • Sensing range • Communication range • Multiple robot coordination • Task allocation • Goal: • Optimum assignment of robots Nuzhet Atay
Planning and Task Allocation Task Distribution Task Distribution • Multi-robot systems require efficient and accurate planning • Global optimal solutions are expensive • communication overhead • planning time • Our Solution: An emergent approach • Emergent: Solution results from interactions of robots • Local approximation to global optimal • Low cost and feasible in real-time Nuzhet Atay
Outline • Problem Definition • Model • Centralized (Global Optimal) Solution • Emergent Approach • Comparison of two methods • Experimental Results • Conclusion Nuzhet Atay
Problem Definition • Objective is to assign robots to • Cover regions of interest • Provide communication between all robots • Control maximum total surface • Explore new regions • We can define this problem as an optimization problem • Given the robot information and environment properties • What is each robot’s ideal next step? Nuzhet Atay
Model • Robots • Constant communication and sensing range • Limited speed • Regions of interest • Targets that need to be tracked by the robots • Several robots may be needed • Input: • Information about the robots and the environment • Expected target positions after n steps • Output • Optimum locations of robots Nuzhet Atay
Centralized Solution Task Assignment Information Collection • Problem is defined as a mixed-integer linear program • Non-linear constraints • Flexible • Easy to customize • Objective: maximize • Target Coverage • Communication • Area Coverage • Exploration R7 T3 R8 R9 R6 T1 R4 R5 R3 T2 R1 R2 Central Server Task Allocation is Determined Nuzhet Atay
Target Coverage • Each robot has a sensing range • Each target has a coverage requirement • A target is covered • Necessary number of robots has the target in sensing range Nuzhet Atay
Communication • Two robots can communicate • If they are within communication range of each other • There is a series of robots that can provide communication Nuzhet Atay
Area Coverage • Maximum area coverage is obtained • Sensor overlap is minimized Nuzhet Atay
Exploration • Robots store the places they have visited • Each robot tries to locate itself outside the explored region Nuzhet Atay
Optimum Distribution • Sample distribution for maximizing • Target coverage • Communication • Area coverage Nuzhet Atay
Additional Constraints • Environment obstacles • Convex • Partitioned into convex obstacles • Convex box surrounding the obstacle Nuzhet Atay
Problems of Global Approach • Solution is not feasible with large number of robots • Solving mixed-integer linear program is NP-Hard • Central server • Too much data transfer • Our solution: • Solve small local problems • Integrate to approximate optimal solution • Advantage is to avoid • Communication overhead • Exponential computation time Nuzhet Atay
Emergent Task Allocation Find a Solution with Local Information Information Sharing • Robots find optimal solutions with local information • Each robot has different information about • Robots in the environment • Targets to be tracked • Environment properties • Solutions are different • Independent suboptimal solutions • To find better solution, robots • Exchange information • Recompute their solutions • Final result depends on • Information content • Number of iterations T3 R7 R8 R9 R6 T1 R4 R5 R3 T2 R1 R2 Recompute Solution with Updated Information Nuzhet Atay
Intentions • Robots send their intended locations to neighbors • Each robot assumes these locations are final • Finds its optimal location Nuzhet Atay
Directives • Robots send expected locations of neighbors • Each robot chooses the best among them Nuzhet Atay
Intentions and Directives • Robots send both their and neighbors computed locations • Each robot finds the best location using options Nuzhet Atay
Intentions, Directives and Target • Robots send • Their and their neighbors’s locations • Possible target assignments • Each robot • Decides a target assignment • Finds the best location using options Nuzhet Atay
Comparison of Global and Emergent • Emergent approach is more efficient • Computation • Communication • Approximate solution to global optimal Nuzhet Atay
Experiments • How well emergent performs? • Comparison to global • Experiment scenario • 8 robots • 6 targets • 3 obstacles • How scalable is the emergent? • 20 robots – 10 targets • 30 robots – 15 targets Nuzhet Atay
Solution - Global Nuzhet Atay
Solution - Emergent Nuzhet Atay
Comparison • Solution quality is comparable # of Targets Covered at Each Step Nuzhet Atay
Evaluation • Emergent approach is 400 times faster than global approach Solution Time Nuzhet Atay
Scalability • Execution time remains constant with larger networks Nuzhet Atay
Conclusion • Planning framework for multi-robot task allocation • Low communication cost and suitable for real-time applications • 400 times faster than the global optimal solution • Comparable solution • Future work: • Different negotiation strategies • Implementation on real robots • Different utility functions Nuzhet Atay
Questions Motion Planning Group http://www.cse.wustl.edu/~bayazit ? Nuzhet Atay
Convergence • ETA approaches to CGO after finite number of steps • Observation: • If all robots find the same solution, then this solution is the same as CGO • At each step • Robots find a solution • Exchange information and negotiate • Assuming all state information is shared • Robots will have information about other robots’ views • After p steps • All robots have the same information and find the same solution Nuzhet Atay
Solution Quality Nuzhet Atay
Solution Quality Nuzhet Atay
Solution Quality Nuzhet Atay
Solution Quality Nuzhet Atay
Solution Quality Nuzhet Atay
Solution Quality Nuzhet Atay