Download
1 / 15
150 likes | 641 Views
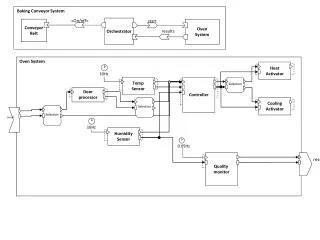
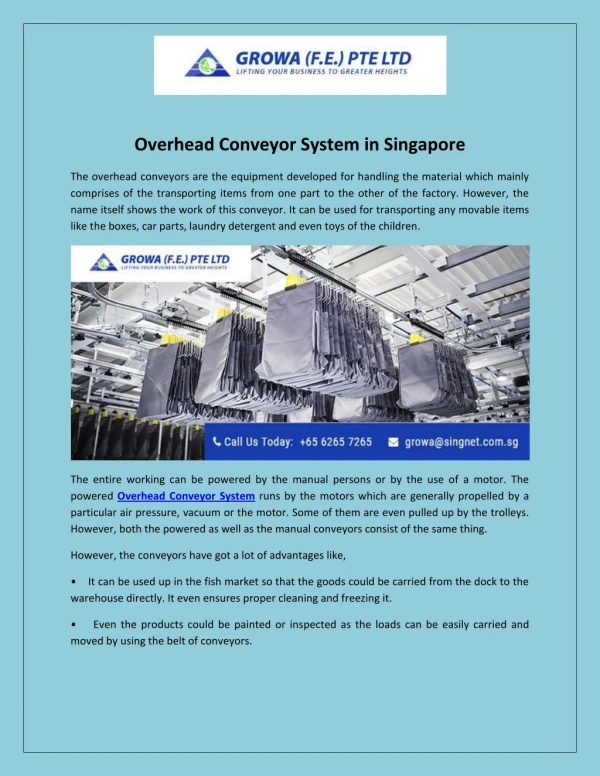
Conveyor System. By: Nicholas Robert Devine Chad Gartzke Scott Strysick. Project Objectives. Simulate an industrial conveyor system Control the system with a PID controller to smoothly stop at a desired distance Tune the system to obtain the most effective results. System Components.

E N D
Conveyor System By: Nicholas Robert Devine Chad Gartzke Scott Strysick
Project Objectives • Simulate an industrial conveyor system • Control the system with a PID controller to smoothly stop at a desired distance • Tune the system to obtain the most effective results
System Components Description Dimensions Qty. Acrylite Plexi Glass 4' x 3' x 1/2" 1 Screws 8 x 1-1/4"LG pkg. Brass Bushings 1/2" x 1/2" I.D. 4 Aluminum Shaft Per Drawing Specification 2 Cast Iron Pulley Per Drawing Specification 2 Side Bracket Per Drawing Specification 4 Cog Belt 1" x 70" O.D. 1 Caster Wheel 1.5" x 4" O.D. 1 1 Motor Mechatronics Lab Motor Pinion Gear Mechatronic’s Supplied 3 Spur Gear Mechatronic’s Supplied 4 Machine Screw 8-32 x 1/2"LG 2 Handyboard Mechatronics Handyboard 1 Wire Mechatronics Lab Wire 1 Sharp GP2D12 Sensor Per Drawing Specification 1
Histogram of Sampling Rate Average = 0.05 STDEV = 0.007
Conclusion • System works properly and functions best at the following tuning conditions: • Kp = 2.55 • Ti = 500 • Td = 0.021